
CNC инструкция по эксплуатации
1. Сборка станка.
Пожалуйста, обратитесь к «Инструкции по сборке» для сборки станка (скачать можно в данном разделе https://minichpu.ru/page/1279409).
2. Отладка (для начала скачайте «Полный пакет» в разделе https://minichpu.ru/page/1279409).
Для начала необходимо подключить плату к сети с помощью болка питания, а также соединить плату с компьютером (ноутбуком) с помощью кабеля USB, входящего в комплект.
— Установить драйвер CH340SER (путь- /driver/).
— Открываем двойным нажатием, появляется сообщение
«Разрешить этому приложению вносить изменения на вашем устройстве?»
Нажимаем – ДА!
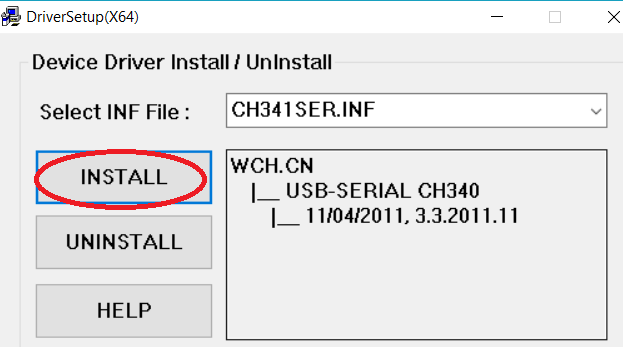
Появляется окно:
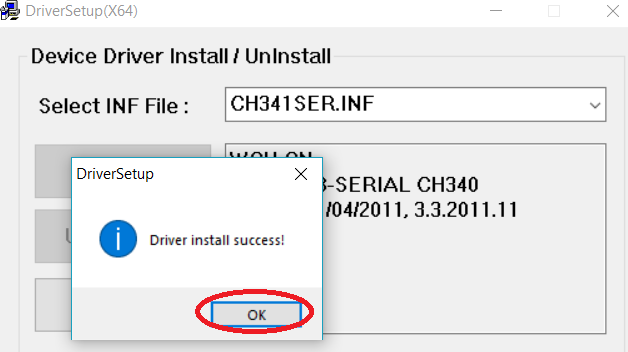
Нажимаем INSTALL, драйвер устанавливается, и появляется окно, что успешно установлен (Driverinstallsuccess!), нажимаем ОК. И закрываем окно.
Определение COM-порта компьютера (для инфо):
- Windows XP: Щелкните правой кнопкой мыши на «мой компьютер», выберите «Свойства», выберите «Диспетчер устройств».
- Windows 7: Нажмите «Пуск» -> щелкните правой кнопкой мыши «компьютер» -> выберите «Управление» -> выберите «Диспетчер устройств» из левой панели.
- В дереве разверните «порты (COM & LPT)»
- Ваш станок будет USB последовательный порт (СОМХ), где “X” представляет собой номер COM порта, например СОМ6.
- Если есть несколько USB-портов, щелкните каждый из них и проверить производителя, станок будет «CH340».
3. Раскройте контрольную программу grblControl.exe, чтобы соединить станок и выбрать правильный порт:
— Открываем двойным нажатием, (станок должен быть подключен и в сеть и через USB).
— Выбираем в меню Сервис ->Настройки, далее Порт (обновляем, и из выплывающего меню выбираем другой порт), нажимаем ОК. Статус меняется на ГОТОВ.
(изначально Статус – Нет соединения)
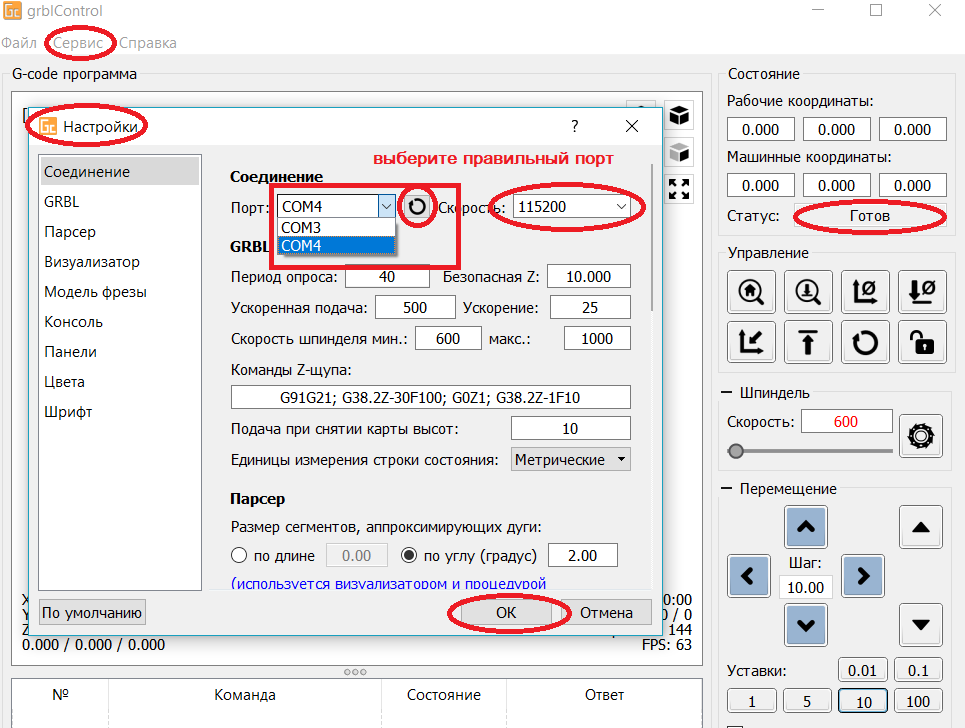
В консоле (внизу): Соединение успешно установлено:[CTRL+X] < Grbl 0.9j [‘$’ forhelp]
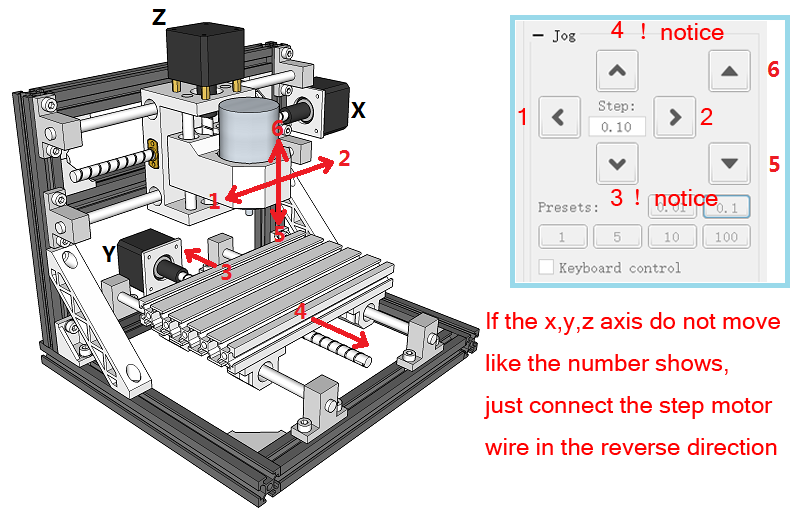
4. Проверить направление оси XYZ:
Если ось x, y, z не двигается, как показано на рисунке, просто подключите провод шагового двигателя в обратном направлении.
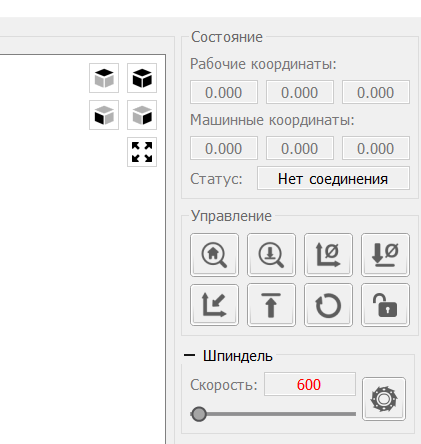
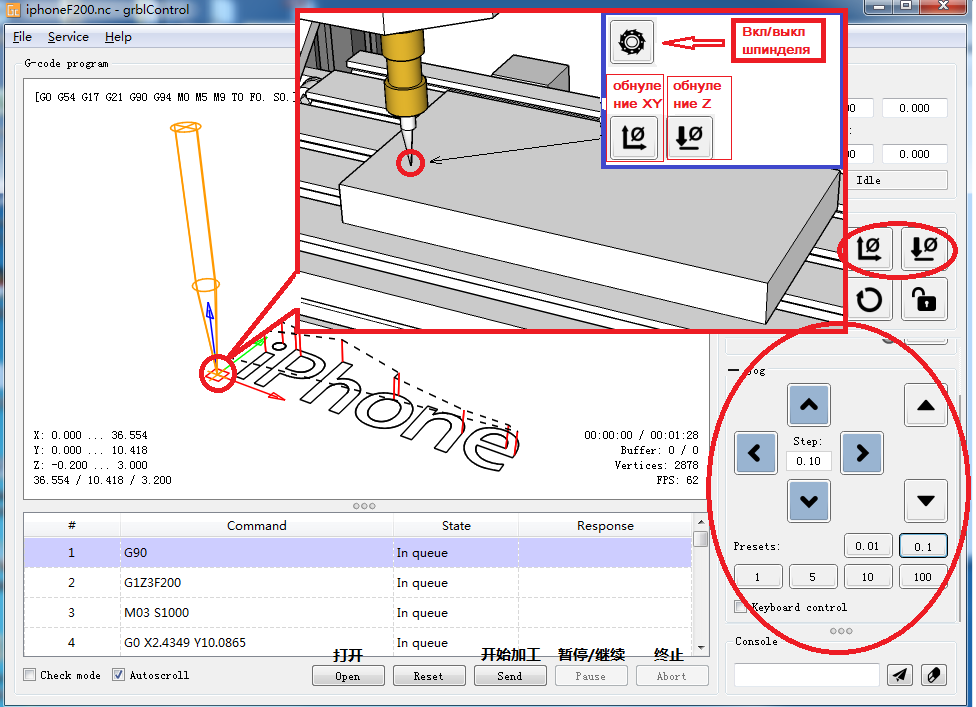
Как обнулить положение гравера:
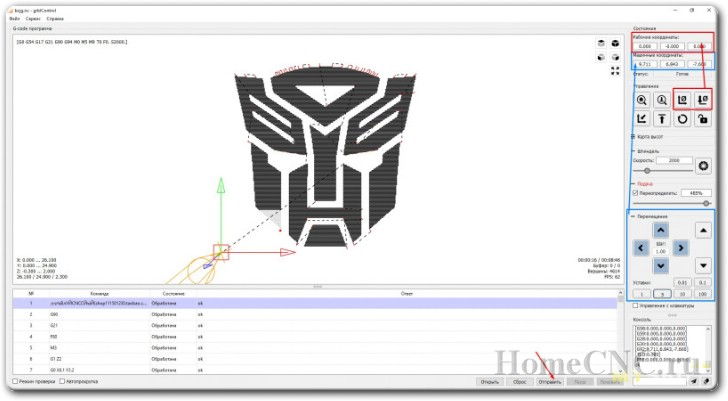
5. После установки станка, откройте файл гравировки — приложение «grblControl.exe» (путь- 3018/software/GRBL/grblControl). В правом верхнем углу статус должен быть ГОТОВ. Необходимо определить, где будет находится нулевая точка. Обычно в левом нижнем углу заготовки.
Сначала подведите шпиндель в левый нижний угол заготовки (с помощью кнопок перемещения X и Y), затем опустите фрезу по оси Z. Замедлить движение можно уменьшив шаг, нажатием кнопок 0,01; 0,1; 1; 5; 10 (расположенные ниже стрелок перемещения).
Когда резец будут приближаться к заготовке, аккуратно подведите его к поверхности заготовки.
Важно! После соприкосновения резца с поверхностью, нажмите в разделе управление кнопки «Обнулить XY» и «Обнулить Z«.
Подсказка: лучше всего опробовать станок на работоспособность без заготовки. Для вращения шпинделя нажмите кнопку «Вкл/Выкл шпиндель», также можно изменять скорость вращения. Произведите перемещение по всем осям. Для возвращения в нулевую точку необходимо нажать кнопку в управлении «Восстановить XYZ«.
Проверьте станок, прежде чем начать официальную гравировку.
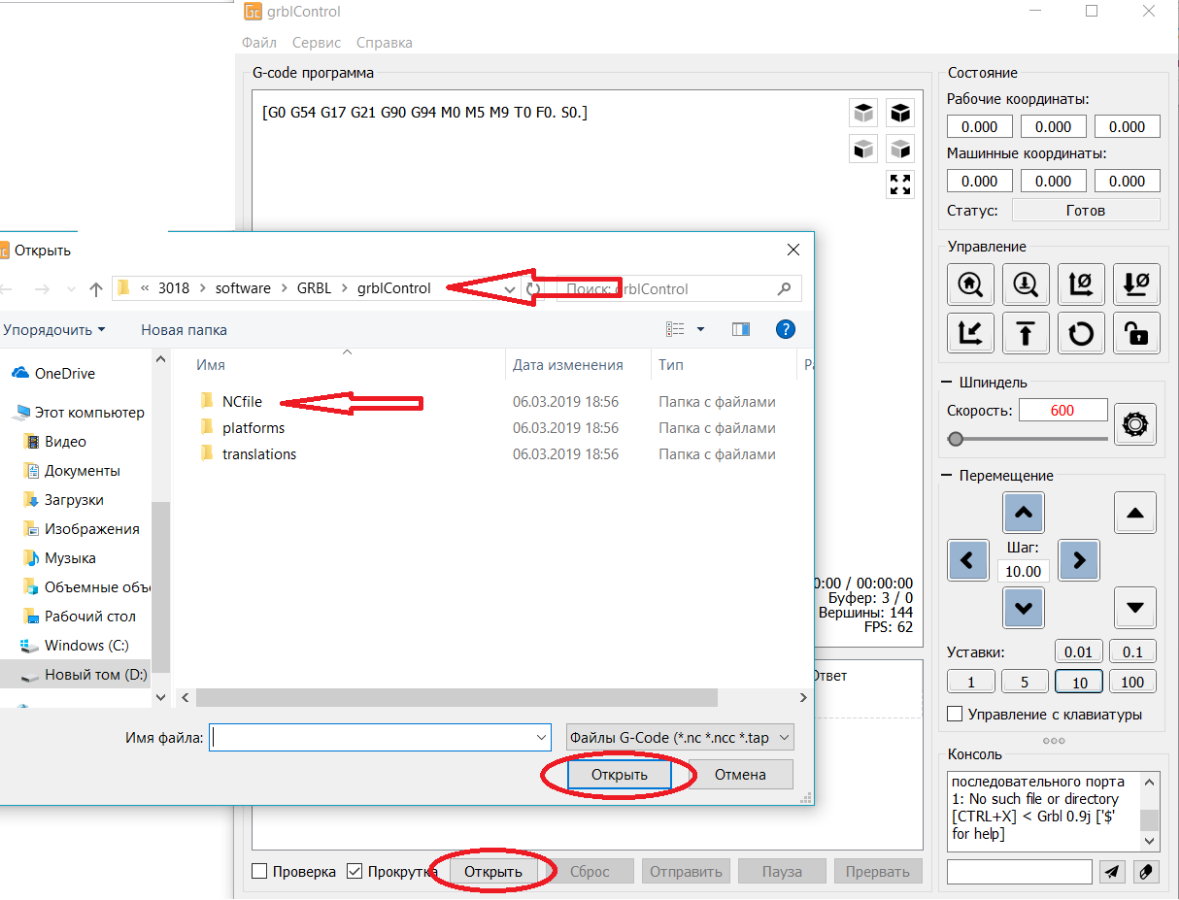
6. Загрузка файла в управляющую программу grblControl.
Затем вы можете нажать кнопку «Открыть» в нижнем углу, выбрать из папки «NCfile» готовый файл (с расширением *.nc), чтобы выгравировать.
7. В папке хранятся готовые файлы.
Этапы работы станков с ЧПУ:
1) формируется модель с помощью специальных графических программ (ArtCam и т.д.) на компьютере.
2) с помощью специальной программы для станка с ЧПУ готовая модель отцифровывается в управляющую программу с расширением *.nc.
3) потом файл открывают управляющей программой «grblControl.exe» и вносят в память ЧПУ. И станок приступает к работе.
Изучайте графическую программу ArtCam, создавайте модели и реализовывайте их с помощью станка CNC 3018.
Подготовлено при участии магазина МИНИ ЧПУ https://minichpu.ru
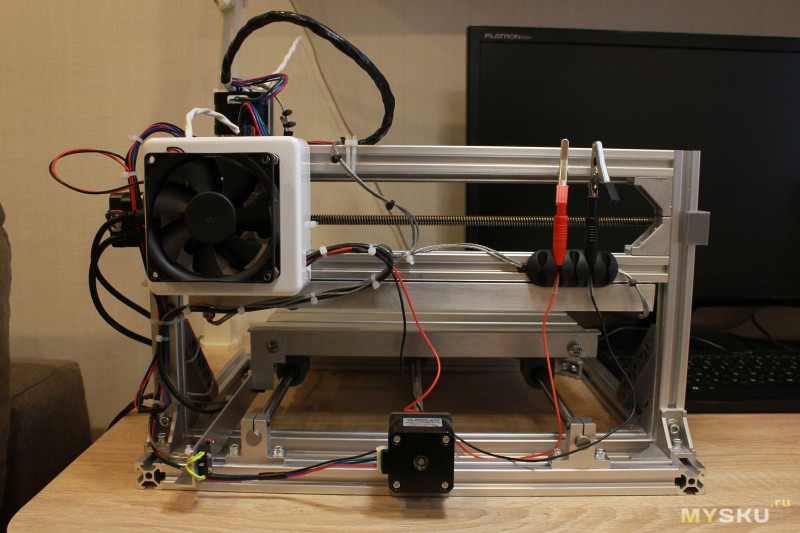
Решил я приобщиться к теме ЧПУ станочков, и прикупил себе CNC 3018 как для общего развития, так и для нарезания на нем всякого добра из фанерок и текстолита. На форуме уже проскакивали обзоры по теме CNC, я бы хотел поделиться своими ощущениями от покупки. Я не буду подробно описывать сборку механической части ( в комплекте идет подробная инструкция, да и просто по фотографии станка на странице товара собрать что-то неправильно очень тяжело ) а постараюсь остановиться именно на вещах, которые вызвали затруднения или были не очевидны.
Нюансы, вылезшие еще на этапе сборки.
Первое — уголки, выполненные из цинкового сплава, нуждаются в небольшой шлифовке поверхностей, соприкасающихся с профилем. Благо, что облой удаляется надфилем буквально за пару секунд. Уголков, кстати, в коробке на 2 больше, чем необходимо для сборки.

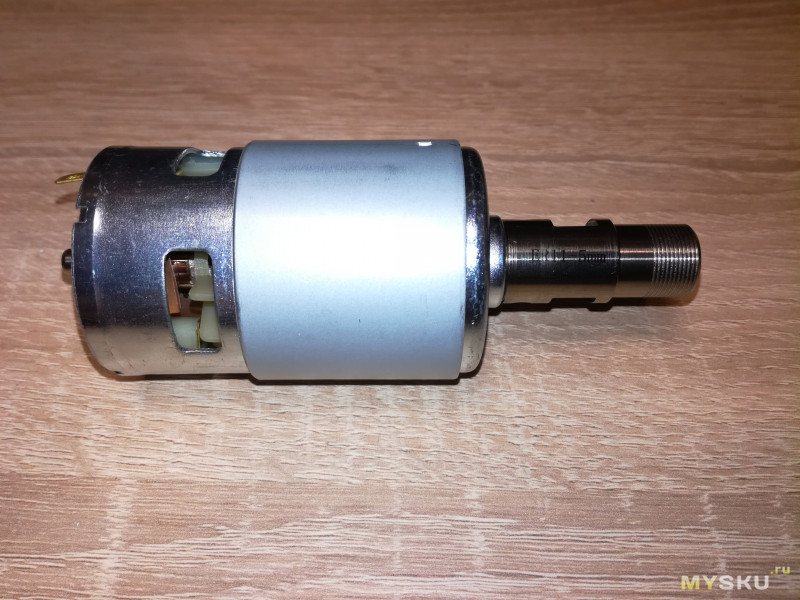
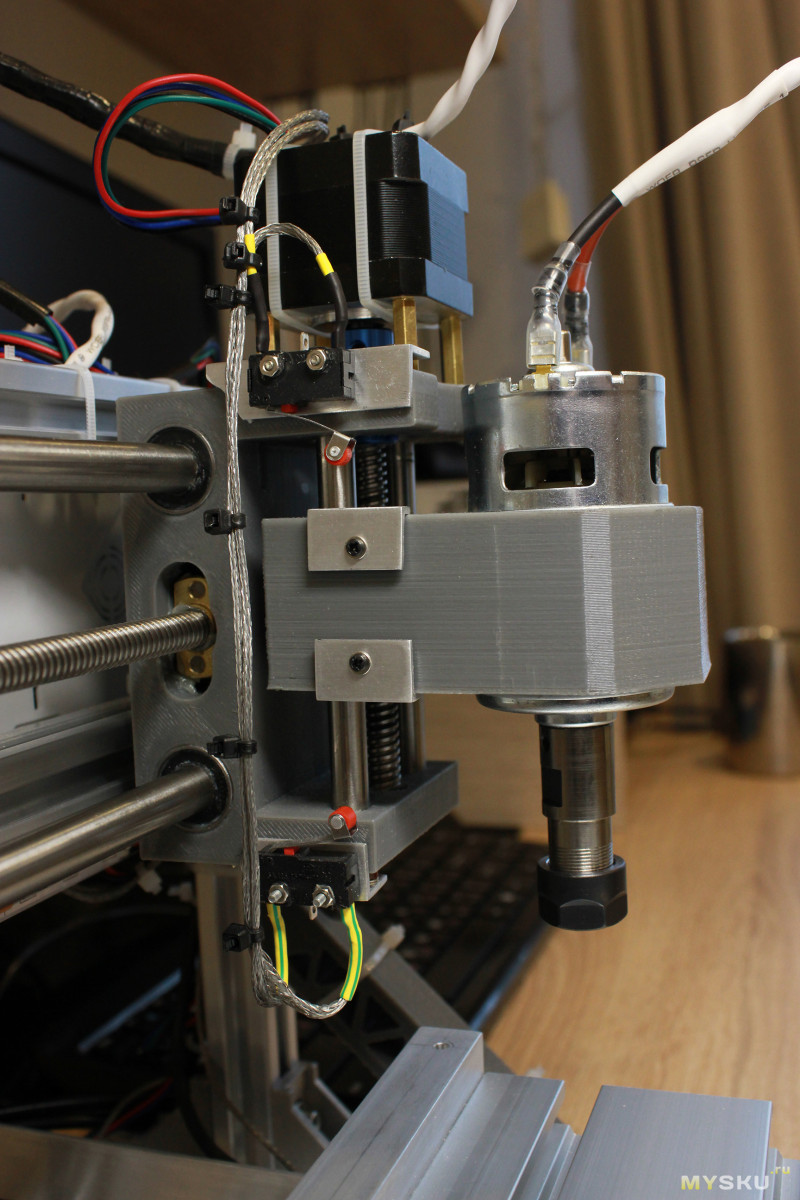
Второе, и самое интересное – одевание патрона цанги на вал двигателя. Первый двигатель с патроном я испортил – нагрел феном патрон, остудил двигатель в морозилке, совместил, пара легких ударов через деревяшку, вал идет крайне туго, пара ударов посильнее… В общем патрон сел на 8 мм и все, сдвинуть его теперь невозможно ни в одном, ни в другом направлении. Двигатель крутится, ощутимых рукой люфтов нет, но звук из подшипников стал громче. Допуски на диаметр вала и посадочного отверстия в патроне гуляют, и у кого то он просто одевается «на холодную», а кто-то не смог нормально одеть и «на горячую». Вывод прост – для уверенности нужно греть патрон градусов до 300 и одевать очень быстро, пока патрон не прогрел вал и не расширил его, и надеяться что вы не попали на крайний случай, когда вал с большим допуском «в плюс», а отверстие в патроне «в минус». После я поменял двигатель с патроном, нагрев последний в духовке. Сел «впритирочку».
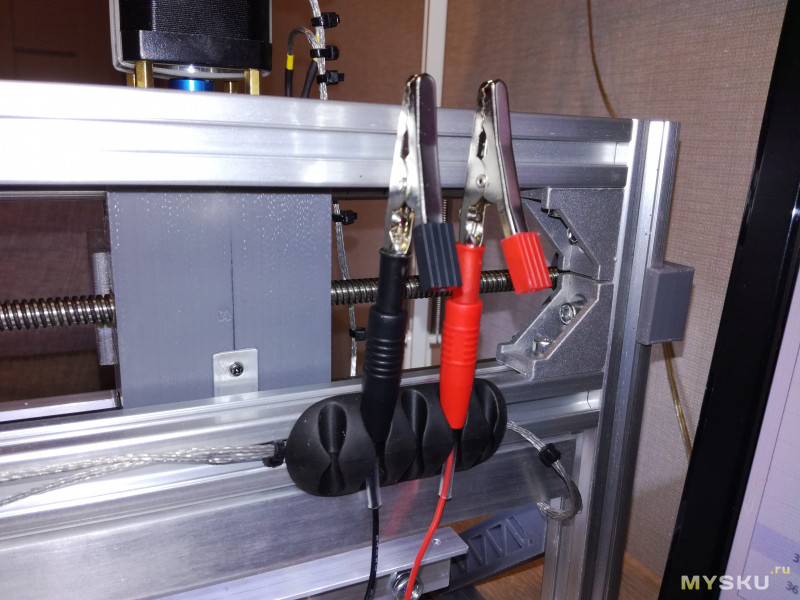
Провода, идущие к двигателю, я позже заменил на силиконовые с чуть большим сечением, усадив скрутку из них в термоусадку. Никаких систем для организации кабельного хозяйства, кроме десятка нейлоновых стяжек, в комплекте нет. Пока будем довольствоваться колхозом. Сразу выведем щупы Z и организуем им парковку. При гравировке печатных плат они пригодятся для поиска нуля по Z и составления карты высот в Candle.
Третье. Мне не повезло, и стол пришел кривой, я бы даже сказал дугообразный. Я даже не стал пытаться его ставить (без шаманства с подкладываем всякого при креплении к столу суппортов с подшипниками и гайкой ходового винта он бы вообще не мог ходить по валам), а сразу написал продавцу и на следующий день получил трек код посылки, в которой приехал новый стол, к счастью, прямой.

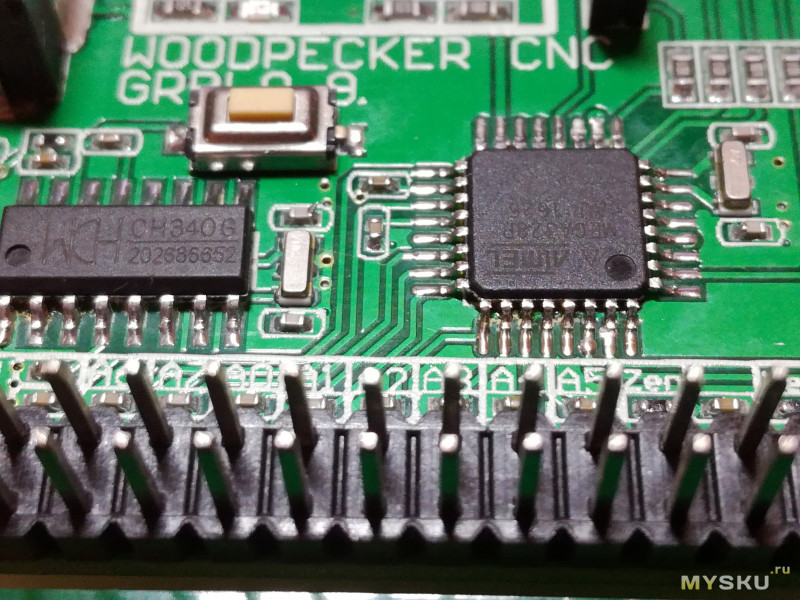
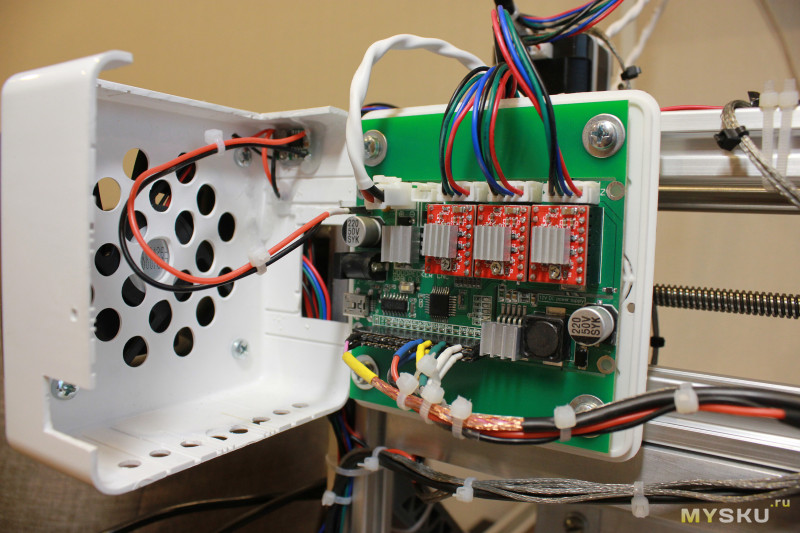
Устанавливаем необходимый софт. Так бы я и сидел со старой версией прошивки grbl 0.9j, привязанный к версии Candle не выше 1.0.11, но случилась еще одна неприятность. После «тыканья» USB-осциллографом на контакты шпинделя в целях посмотреть там ШИМ (DS205 только пришел, и станок стоял на столе, я не удержался, и предвосхищая нападки сразу укажу – он был подключен к ноутбуку, работающему от батареи) плата контроллера перестала подавать признаки жизни и на ней постоянно горели светодиоды Rx и Tx. Было решено перекинуть микросхему контроллера Atmega328P, но даже со снятой микросхемой (аккуратно выкушенной, ручка фена была еще в пути на момент аварии) светодиоды продолжали постоянно гореть, что указывало на гибель микросхемы CH340 (преобразователь USB-SERIAL TTL), и она была заменена. Контроллер Atmega328P был поставлен чистый, все было соединено по стандартной схеме для заливки bootloader-а в чип и последующей загрузки самой прошивки grbl 1.1f.
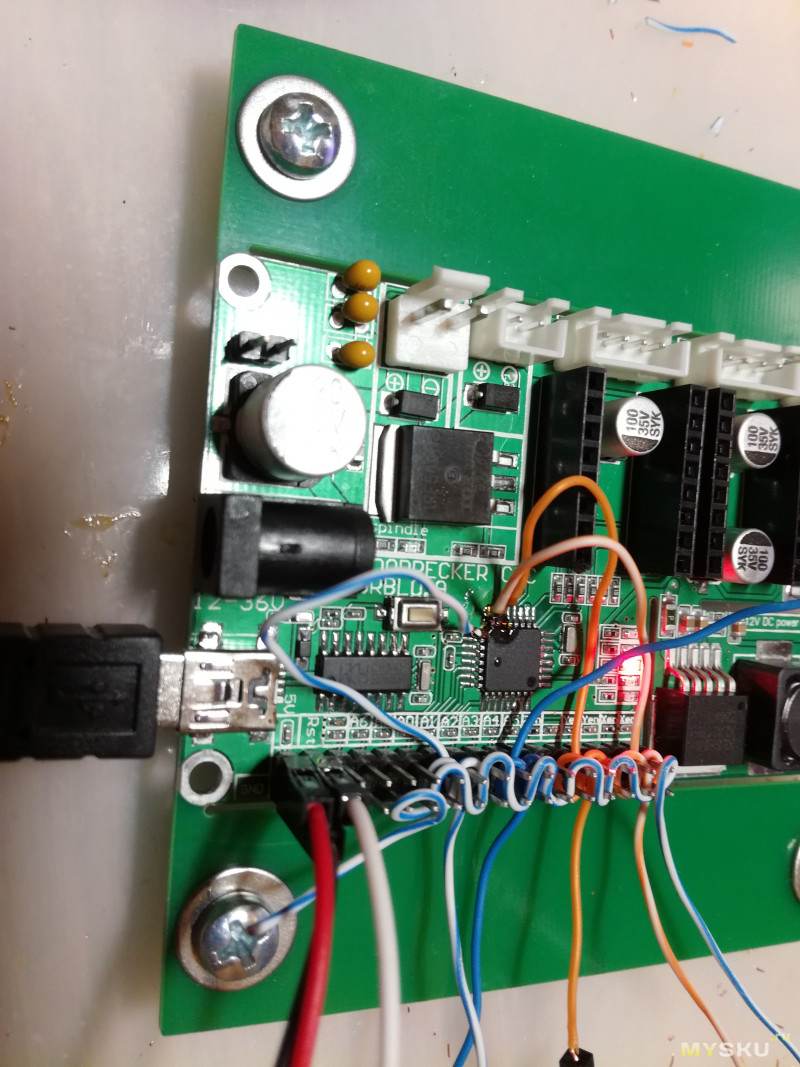
Но чуда не произошло, avrdude говорил о неправильной сигнатуре контроллера, и даже после ее подмены отказывался нормально заливать bootloader. Танцы вокруг прошивки продолжались еще долго, и я перейду сразу к тому что сработало — для исключения влияния самой платы woodpecker нужные ноги Atmega328P были приподняты над ней и кинуты проводки напрямую к Arduino NANO, используемой как ISP.
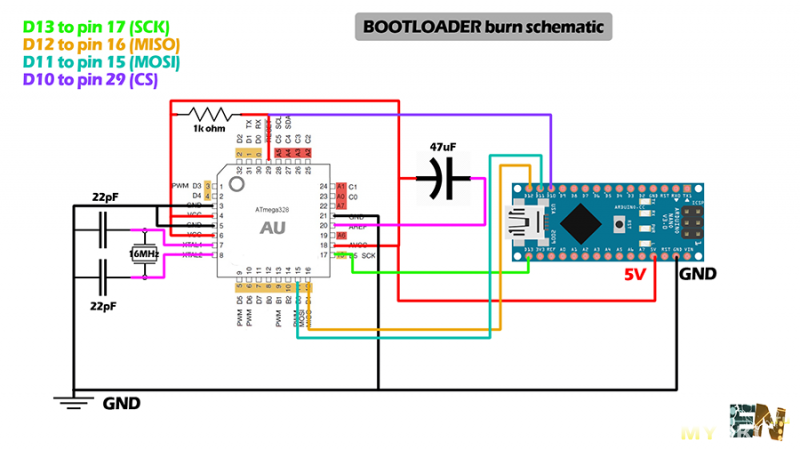
И о чудо, bootloader успешно залился, я подключил USB к самой плате woodpecker и через XLoader залил новую прошивку grbl 1.1f.20170801. После этого ноги микросхемы были возвращены на законное место. Эпопея с поломкой и починкой заняла три вечера, и подняла мой уровень общения с современными микроконтроллерами. Через командную строку в Candle или монитор порта в Arduino IDE необходимо настроить параметры прошивки (указаны значения, установленные мною, которые вполне могут не подойти другим):
$3 = 5 Маска инвертирования сигналов направления по осям: (маска: 00000101). То есть я инвертировал оси X и Z, чтобы получить привычное человеческое расположение нуля на заготовке слева внизу. Маска выглядит следующим образом: 00000ZYX – просто выставляем 0 в бит, где инвертирование не требуется, и 1 в бите той оси, где требуется.
$100 = 800,000 Число шагов на мм. по оси X, шаг / мм. Тут, как и в двух последующих пунктах, ничего настраивать не пришлось.
$101 = 800,000 Число шагов на мм. по оси Y, шаг / мм.
$102 = 800,000 Число шагов на мм. по оси Z, шаг / мм.
$110 = 600,000 Максимальная скорость перемещений по оси X мм / мин. Я хотел поставить скорости по X и Y поменьше, но на более низких скоростях звук был крайне неприятным, а вот 600 звучало не слишком громко и напрягающее.
$111 = 600,000 Максимальная скорость перемещений по оси Y мм / мин
$112 = 150,000 Максимальная скорость перемещений по оси Z мм / мин. Тут я решил что спешить мне некуда, а испорченная заготовка / сломанная фреза удовольствия доставят минимум.
$120 = 30,000 Ускорение по оси X (чем больше значение тем быстрее разгон) мм / сек ^ 2
$121 = 30,000 Ускорение по оси Y (чем больше значение тем быстрее разгон) мм / сек ^ 2
$122 = 30,000 Ускорение по оси Z (чем больше значение тем быстрее разгон) мм / сек ^ 2
Настраиваем ток шаговых двигателей. Приходят они настроенными как попало. У нас установлены шаговики 17HS1352-P4130 с номинальным током фазы 1.33 А. Драйвер установлен A4988, с предельным током 2 А и токозадающими резисторами 0.1 Ом.
Настраивать будем используя следующую формулу:
Imax = Vref /8*Rs
Vref удобнее всего измерять прямо на движке подстроечного резистора относительно земли (она выведена на весь нижний ряд гребенки 2.54 мм.), можно даже совместить, подцепив крокодил на отвертку (учитывайте, что при нажатии на подстроечник показания немного уплывут).
Выставив 0.64 В я получил ограничение рабочего тока в 0.8 А. В требования для шаговика мы укладываемся, а запас позволяет снизить нагрев драйверов и самих двигателей (а он весьма ощутим если они стоят на удержании).
В комплекте к станку нет никакого намека на концевые выключатели. Я решил сразу подключить имеющиеся в запасе концевики и настроить работу прошивки с ними. Мы можем работать с концевиками двумя способами – с нормально разомкнутыми, и нормально замкнутыми. Дабы исключить ложные срабатывания, был выбран второй вариант, к тому же он сокращает расходы провода. При нем концевики подключаются последовательными парами для каждой оси (в варианте с нормально разомкнутыми – параллельными).
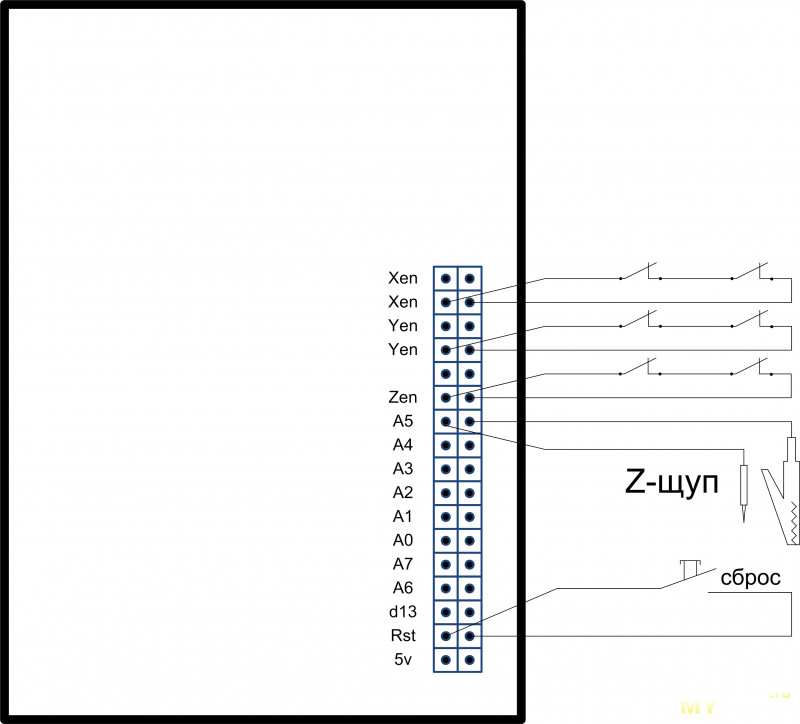
На гребенке платы выведены контакты для подсоединения концевиков, тянуть лишние провода не стоит, так как контакты запараллелены для каждой оси. Я использовал экранированный провод, немного алюминиевого профиля, крепежа и нейлоновых стяжек, а так же творческий запал. К каретке оси Z весь профиль для крепления концевиков и упоры крепились мелкими саморезами с предварительным засверливанием и проклейкой отверстия.

После сборки электромеханической части, приступаем к настройке прошивки.
$5 = 1 Инвертирование входов от конечных датчиков (концевики), BOOL. Для нормально разомкнутых выставляем 0.
$21 = 1 Включить ограничение по концевым датчикам, BOOL.
$22 = 1 Автопозиционирование по концевикам, поиск точки Home, BOOL. Включил, чтобы было удобно, нажал кнопку в Candle, и станок сам встал домой (в ноль).
$23 = 3 Маска инвертирования направления движения к точке Home (маска: 00000011). По умолчанию станок уползал в конец по осям X и Y, пришлось по ним инвертировать направление движения. Маска соответствует маске для $3 = XX – инвертированию направления осей.
$24 = 30,000 Скорость движения у концевиков, мм / мин. Это скорость движения после того, как станок наехал на концевик в поисках home в первый раз и, отскочив, начал медленно наезжать вновь. Она намного ниже для более точной фиксации момента срабатывания концевика.
$25 = 300,000 Скорость движения к точке Home, мм / мин. Скорость, с которой начнется движение к концевикам независимо от положения станка. Если она выше максимальной скорости по какой-либо из осей, то ограничение будет выставлено по нижнему порогу.
$26 = 250 Задержка срабатывания концевиков (антидребезг) мс. Использую такую дешевую механику как у меня, ставить ниже наверное не стоит.
$27 = 2,000 Расстояние «отскока» от концевиков, мм. На это расстояние отскочит станок по всем осям после того как встанет в точку home.
Станина станка сильно вибрирует, вокруг летит пыль, а плата такая незащищенная, и к тому же горячая — строим «скворечник» для нашего «дятла». Корпус от распределительной коробки освобождаем от внутренного богатства, рассверливаем отверстия под крепеж платы и под крепеж самого корпуса к раме. К раме крепим его через антивибрационные стойки от старого CD-ROMа. В верхней крышке вырезаем окна для кабельного хозяйства и устанавливаем 80 мм. вентилятор. Запитываем его от отдельного DC-DC, чтобы можно было выставить обороты.
Для питания самого DC-DC 12 В берем с разъема на плате, расположенного над входным электролитом, никак не подписанного, но скорее всего для вентилятора и служащего.
На этом основные трудности заканчиваются, и можно опробовать станок в деле.
Нужен был аккуратный чистый рез добора из МДФ, при подаче в 50 и ручном управлении фрезой-кукурузой 2 мм с заглублением 1 мм за проход отрезаем. Долго, но рез получился что надо, немного проходимся наждачкой по фаскам.


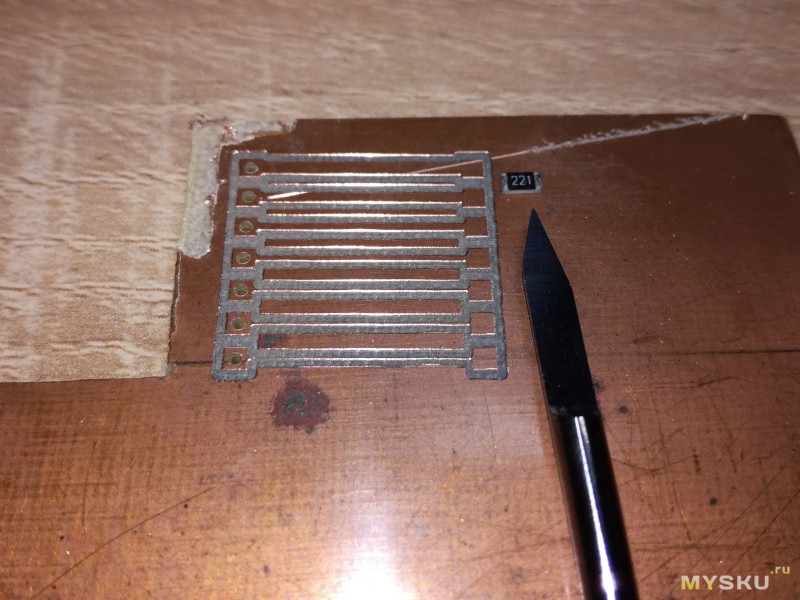
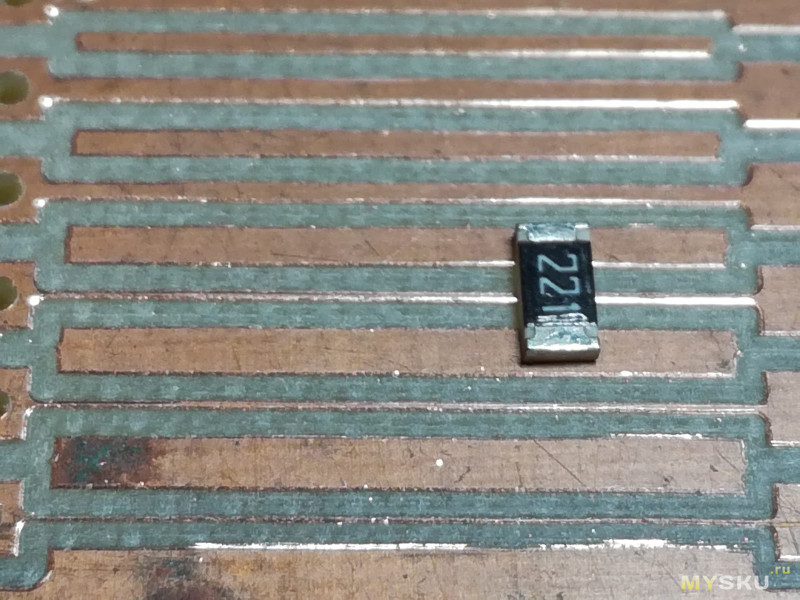
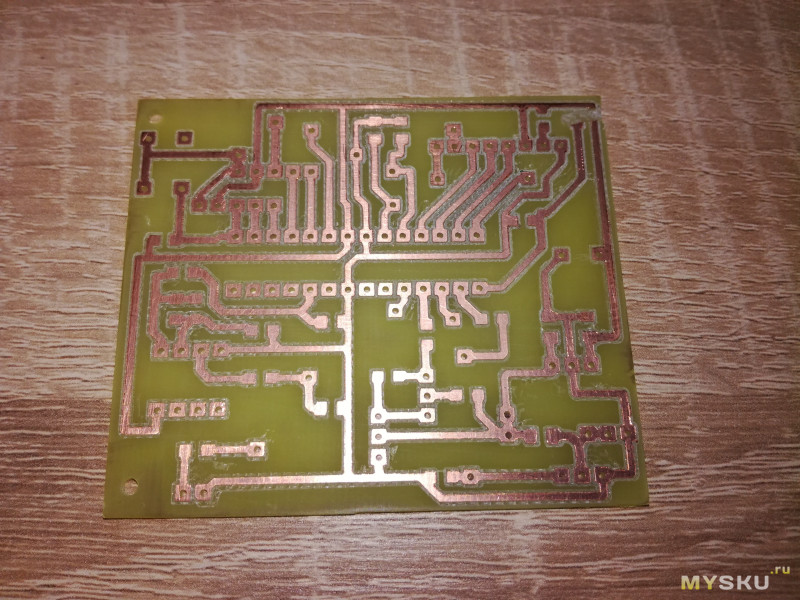
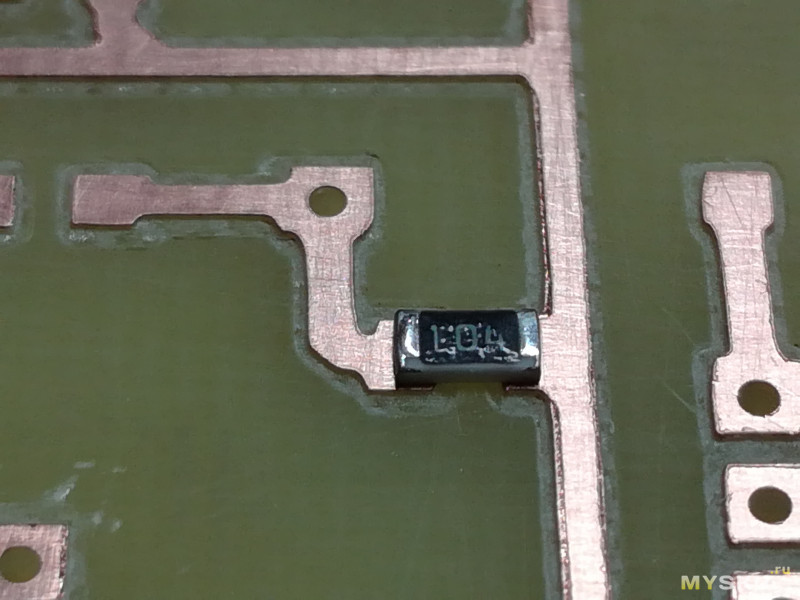
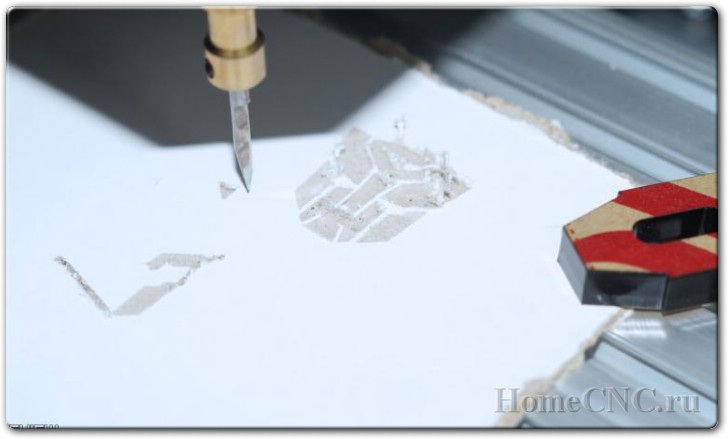
Задачка посложнее – гравировка печатных плат. Берем старый кусок советского текстолита (кстати, постарше меня будет, по наследству достался) и делаем дорожки. Результат рядом с резистором 1206.
Теперь изготовим платку для симистора с опторазвязкой, для усложнения ставим заготовку по центру стола, где люфты на длинных валах оси X максимальны:
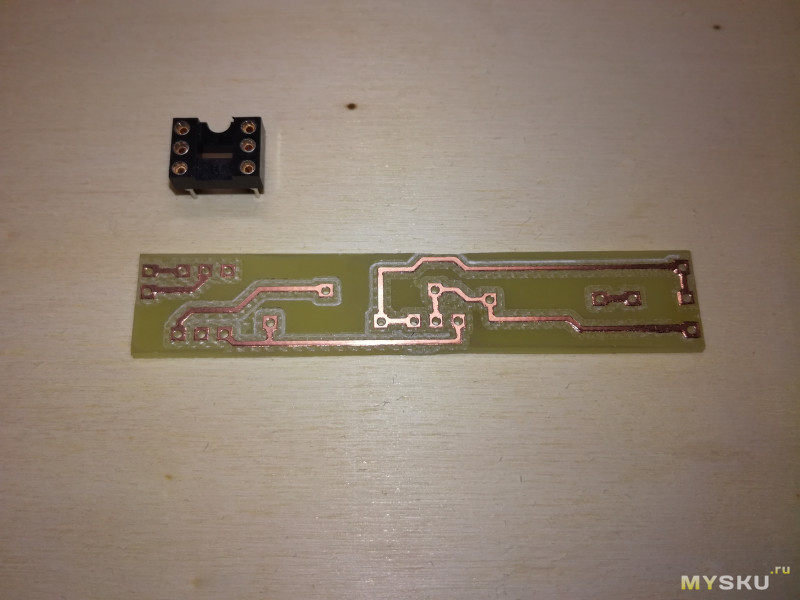
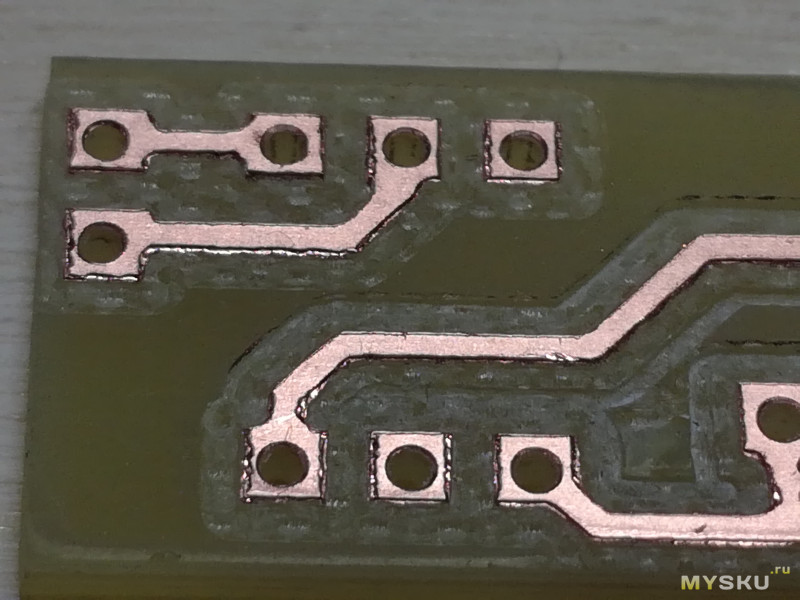
Результат так себе. Я грешил на люфт, но проблема была не только в нем. На первом тесте я использовал только штатные зажимы для крепления заготовки к столу, а в этот раз использовал толстый двухсторонний скотч. Он «играет», и поэтому с первого раза рез получился не везде, пришлось делать заглубление больше, а так как гравер имеет треугольную форму, то он подрезал край дорожки, и они стали уже и качество самого реза снизилось. Так же выяснилось, что китайские гравера обламываются даже при самой маленькой подаче и заглублении всего в 50 мкм. Но обламываются по-разному, и один потом может делать чистый аккуратный рез, а другой будет задирать края. Третий обломившийся гравер на следующей печатной плате снимал стружку длиной во всю дорожку, как результат рез получался чище. Видимо, в пользу советского текстолита сыграла так же и общая его жесткость, и гораздо более толстый слой меди. С креплением заготовок печатных плат придется поломать голову. Во первых, оно должно быть по всей нижней поверхности, чтобы не было «пузырей», которые бы играли под фрезой. Во вторых, оно должно быть надежным, при отрезании заготовки ее легко может вывернуть, на фото ниже на плате перерезана дорожка в правом верхнем углу фрезой. И в третьих, оно должно быть устойчиво к воде, так как во время работы заготовку стоит помочить и избавиться тем самым от текстолитовой пыли. И если для мелких плат комплектное крепление годится, то уже платы размером больше 70×70 мм они крепят с горбинкой. Вот фото работы станка после учета недостатков крепления.
Плюсы CNC 3018:
+ Вы получаете возможность начального знакомства с ЧПУ с минимальными затратами времени, но при наличии последнего в некотором количестве, вы так же бонусом получаете возможность по совершенствованию самого станка, а параллельно и своих навыков.
+ Станок из коробки способен на работу после минимальной настройки.
Минусы:
— Качество запчастей может хромать. Нет никакой гарантии, что после получения станка вам не придется ждать еще, чтобы наконец-то получить какие-то запчасти взамен бракованным.
— Пластиковая каретка оси Z. Мне кажется, что станок все же должен быть более прочным.
— Огромный вылет по оси X приводит к тому, что когда каретка находится на середине этой оси, она имеет существенный люфт, так как вал немного прогибается. Это в свою очередь может приводить к резонансу всей конструкции на высоких оборотах шпинделя (порядка 10 000 об/мин). Заменив шпиндель на более оборотистый, можно уйти от резонанса, работая на оборотах, выше критических, да и для фрезеровки ПП он подойдет наверное лучше. Но гораздо правильнее – поменять слишком хлипкие валы по X с текущих 10 мм на минимальные 16 мм. Однако, это приведет к необходимости полной замены каретки оси Z. В будущем, я, наверное, так и поступлю, ту часть каретки что с подшипниками, гайкой и креплением шпинделя оставлю, а заднюю половину, наверное, придется сделать из фанеры/ламината на самом станке.
— Для каждого вида работ нужно искать подходящую оснастку. Гравера из комплекта оставляют желать лучшего. Так же придется освоить приличное количество программного обеспечения для раскрытия потенциала станка.
Выводы: если у вас есть время и желание возиться и дорабатывать станок до ума, но вы не готовы к самостоятельной закупке и сборке с нуля, то вариант с покупкой такого конструктора можно считать оправданным. Для тех кто не знаком с ЧПУ, но очень хочет познакомиться, наверное, будет намного проще начать именно с такого конструктора, чтобы понять, нужно оно вам или нет. Если же у вас есть желание работать именно на результат, то целесообразнее станок собирать по частям, чем дорабатывать этот, так как цена доработок сопоставима со стоимостью всего станка.
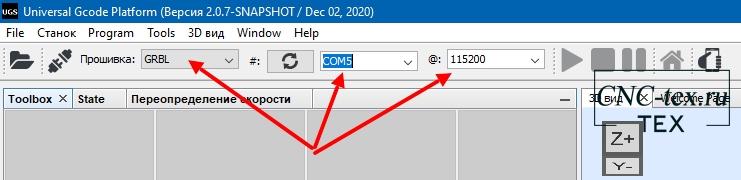
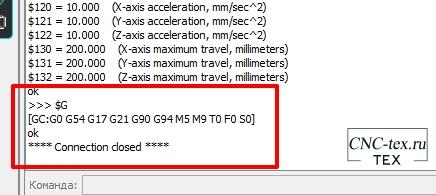
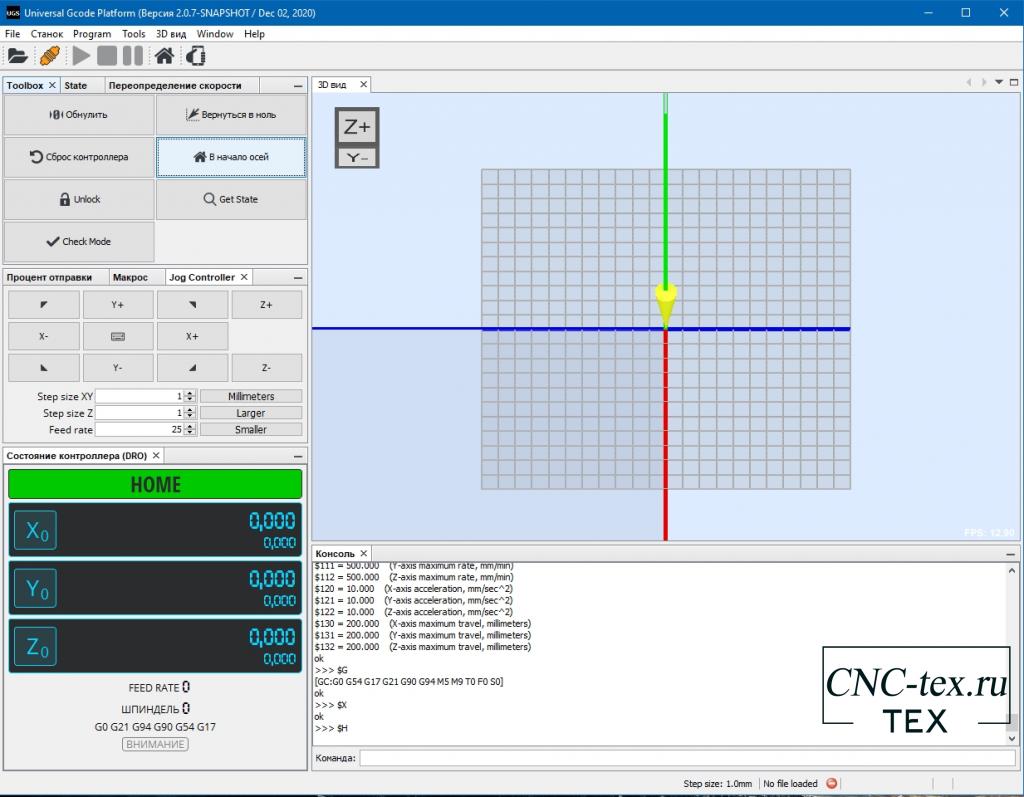
После подключения контроллера к программе Universal G-Code Sender необходимо ввести в командной строке «$$» и нажать «Enter», контроллер выведет перечень системных настроек.
(Пример для версии GRBL v1.1g, в зависимости от версии прошивки и программы управления могут быть отличия).
$0 = 10 (Step pulse time, microseconds)
$1 = 25 (Step idle delay, milliseconds)
$2 = 0 (Step pulse invert, mask)
$3 = 0 (Step direction invert, mask)
$4 = 0 (Invert step enable pin, boolean)
$5 = 0 (Invert limit pins, boolean)
$6 = 0 (Invert probe pin, boolean)
$10 = 1 (Status report options, mask)
$11 = 0.010 (Junction deviation, millimeters)
$12 = 0.002 (Arc tolerance, millimeters)
$13 = 0 (Report in inches, boolean)
$20 = 0 (Soft limits enable, boolean)
$21 = 0 (Hard limits enable, boolean)
$22 = 0 (Homing cycle enable, boolean)
$23 = 0 (Homing direction invert, mask)
$24 = 25.000 (Homing locate feed rate, mm/min)
$25 = 500.000 (Homing search seek rate, mm/min)
$26 = 250 (Homing switch debounce delay, milliseconds)
$27 = 1.000 (Homing switch pull-off distance, millimeters)
$30 = 1000 (Maximum spindle speed, RPM)
$31 = 0 (Minimum spindle speed, RPM)
$32 = 0 (Laser-mode enable, boolean)
$100 = 250.000 (X-axis travel resolution, step/mm)
$101 = 250.000 (Y-axis travel resolution, step/mm)
$102 = 250.000 (Z-axis travel resolution, step/mm)
$110 = 500.000 (X-axis maximum rate, mm/min)
$111 = 500.000 (Y-axis maximum rate, mm/min)
$112 = 500.000 (Z-axis maximum rate, mm/min)
$120 = 10.000 (X-axis acceleration, mm/sec^2)
$121 = 10.000 (Y-axis acceleration, mm/sec^2)
$122 = 10.000 (Z-axis acceleration, mm/sec^2)
$130 = 200.000 (X-axis maximum travel, millimeters)
$131 = 200.000 (Y-axis maximum travel, millimeters)
$132 = 200.000 (Z-axis maximum travel, millimeters)
ok
Попробуем разобраться, что это все значит и как это менять.
$0 = 10 (Step pulse time, microseconds)
Длительность импульса шага, микросекунды
Драйверы шаговых двигателей имеют ограничение на минимальную длительность шагового импульса. Уточнить необходимое значение можно в документации на драйвер или перебором различных вариантов. Необходимо подобрать максимально короткий импульс, которые драйвер способен надежно распознавать. Если импульсы будут слишком длинные, вы можете столкнуться с проблемами при высоких скоростях подачи и большой частоте, возникающими из-за того, что идущие подряд импульсы начнут перекрывать друг друга.
$1 = 25 (Step idle delay, milliseconds)
Задержка отключения двигателей, миллисекунды
Задержка отключения двигателей — это интервал времени, в течении которой Grbl сохраняет подачу питания на двигатели перед отключением. Параметр меняется от 0 до 255.
— 0 — напряжение снимается сразу;
— 255 — напряжение не снимается никогда.
В зависимости от системы, вы можете установить значение этого параметра в ноль и отключить задержку. В других случаях может потребоваться использовать значение 25-50 миллисекунд, чтобы оси успели полностью остановиться перед отключением двигателей. Отключение необходимо для тех двигателей, которые не следует держать включенными в течении длительного периода времени на холостом ходу из-за нагрева. Так же стоит помнить, что в процессе отключения некоторые драйверы шаговых двигателей не запоминают на каком микрошаге они остановились, из-за этого случается ‘пропуск шагов’ при отключении/включении двигателей. В этом случае рекомендуется держать двигатели всегда включенными.
$2 = 0 (Step pulse invert, mask)
Инверсия шагового импульса, маска
Этот параметр управляет инверсией сигнала шаговых импульсов. По-умолчанию считается, что сигнал шагового импульса начинается в нормально-низком состоянии и переключается в высокое на период шага. По истечении времени, заданного параметром $0, вывод переключается обратно в низкое состояние, вплоть до следующего шага В режиме инверсии, шаговый импульс переключается из нормально-высокого в низкое на период импульса, а потом возвращается обратно в высокое состояние. Большинству пользователей не требуется менять значение этого параметра, но это может оказаться полезным, если конкретные драйверы шагового двигателя этого требуют. Например, инверсией вывода шагового импульса может быть обеспечена искусственная задержка между изменением состояния вывода направления и шаговым импульсом.
Этот параметр хранит настройки инверсии осей в виде битовой маски. Для изменения параметра необходимо ввести значение соответствующее тем осям, которые нужно инвертировать. Например, чтобы инвертировать оси Y и Z, отправьте $2=6 в Grbl.
| Значение | Маска | Ось Х | Ось Y | Ось Z |
| 0 | 00000000 | — | — | — |
| 1 | 00000001 | + | — | — |
| 2 | 00000010 | — | + | — |
| 3 | 00000011 | + | + | — |
| 4 | 00000100 | — | — | + |
| 5 | 00000101 | + | — | + |
| 6 | 00000110 | — | + | + |
| 7 | 00000111 | + | + | + |
$3 = 0 (Step direction invert, mask)
Инверсия направления шага, маска
Этот параметр инвертирует сигнал направления для каждой из осей. По-умолчанию, Grbl предполагает, что ось движется в положительном направлении, когда уровень сигнала направления низкий, и в отрицательном — когда высокий. Часто оси в некоторых станках движутся не так. Этот параметр изменит инвертирует сигнал направления для тех осей, что движутся в обратную сторону.
Эта маска работает точно так, как и инверсия порта шаговых импульсов и хранит информацию об инверсии осей в битовой маске. Для настройки нужно просто отправить значение, указывающее какие оси инвертировать. Используйте значения из таблицы выше. Например, если хотите инвертировать направление только по оси X, вам нужно отправить Grbl команду $3=1.
$4 = 0 (Invert step enable pin, boolean)
Инверсия сигнала включения шаговых двигателей, логический
Высокий уровень сигнала включения шаговых двигателей соответствует выключению, а низкий — включению. Если ваша сборка требует обратного, просто инвертируйте сигнал, введя $4=1. Отключается с помощью $4=0.
$5 = 0 (Invert limit pins, boolean)
Инверсия входов концевых выключателей, логический
По умолчанию, входы концевых выключателей подстраиваются по питанию встроенным резистором Arduino. Когда сигнал на входе принимает низкий уровень, Grbl рассматривает это как срабатывание выключателя. Для противоположного поведения, просто инвертируйте входы, введя $5=1. Отключается командой $5=0. Может потребоваться перезапуск контроллера, чтобы изменения вступили в силу.
ПРИМЕЧАНИЕ: Если вы инвертируете входы концевых выключателей, потребуется внешний резистор подстройки к земле, чтобы предотвратить перегрузку по току и сгоранию входа.
$6 = 0 (Invert probe pin, boolean)
Инверсия входа щупа, логический
По-умолчанию, вход щупа подстраивается по питанию встроенным резистором Arduino. Когда сигнал на входе принимает низкий уровень, Grbl рассматривает это как срабатывание датчика. Для противоположного поведения, просто инвертируйте вход щупа, введя $6=1. Отключается командой $6=0. Может потребоваться перезапуск контроллера, чтобы изменения вступили в силу.
ПРИМЕЧАНИЕ: Если вы инвертируете вход контактного датчика, потребуется внешний резистор подстройки по напряжению земли, чтобы предотвратить перегрузку по току и сгоранию входа.
$10 = 1 (Status report options, mask)
Вывод статуса, маска
Параметр определяет, какие данные реального времени вернет Grbl, когда пользователь запрашивает статус командой реального времени’?’. Эта данные включают в себя текущее состояние, текущие координаты, текущую скорость подачи, значения на входах, текущие переопределенные значения, состояния буферов, и номер выполняемой команды G-кода (если было включено при компиляции).
По-умолчанию новая реализация вывода отчета в Grbl v1.1 включает в себя вывод информации практически обо всем в стандартном выводе статуса. Множество данных скрывается и выводятся только тогда, когда их значение меняется. Это существенно увеличивает производительность по сравнению со старыми способами и позволяет значительно быстрее получать обновленные данные о станке, в большем объеме. Документация на интерфейс в общих чертах рассказывает, как это работает, хотя в основном она предназначена только для разработчиков графических интерфейсов или продвинутых пользователей.
Для простоты и удобства, Grbl v1.1 имеет всего две опции для данного параметра. Обе используются пользователями и разработчиками в основном для отладочных целей.
— Текущие координаты могут быть настроены на вывод либо машинных координат (MPos:), либо рабочих (WPos:), но не обеих одновременно. Включение рабочих координат полезно в некоторых случаях при прямом управлении через последовательный порт, но машинные координаты необходимо использовать по-умолчанию.
— Может быть включен вывод информации об использования буфера в планировщике и приемнике последовательного порта Grbl. При этом показывается количество блоков или байт, доступных в соответствующем буфере. Это, нужно для оценки производительности Grbl при тестировании потоковых интерфейсов . Эту опцию по-умолчанию следует отключить.
Используйте таблицу ниже для определения включаемых/отключаемых параметров. Просто сложите значения в строках, содержащих включаемые параметры и сохраните в Grbl полученное значение. Например, отчет, содержащий машинные координаты без данных о буфере соответствует параметру $10=1. Рабочие координаты и информация о буфере соответствуют параметру $10=2.
| Тип отчета | Значение | Обозначение |
| тип координат | 0 | Включен MPos; выключен WPos |
| тип координат | 1 | Включен MPos; выключен WPos |
| буфер данных | 2 | Включен Buf: поле выводит количество свободного места в буферах планировщика и приемника последовательного порта. |
$11 = 0.010 (Junction deviation, millimeters)
Отклонение на стыках, мм
Заданная величина отклонения на стыках, используется модулем управления ускорением для определения скорости перемещения через стыки отрезков запрограммированного в G-коде пути. Например, если путь в G-коде содержит острый выступ с углом в 10 градусов, и станок двигается к нему на максимальной скорости, данный параметр поможет определить насколько нужно притормозить, чтобы выполнить поворот без потери шагов. Вычисление выполняются довольно сложным образом, но в целом, более высокие значение дают более высокую скорость прохождения углов, повышая риск потерять шаги и сбить позиционирование. Меньшие значение делают модуль управления более аккуратным и приводят к более аккуратной и медленной обработке углов. Так что, если вдруг столкнетесь с проблемой слишком быстрой обработкой углов, уменьшите значение параметра, чтобы заставить станок притормаживать перед прохождением углов. Если хотите, чтобы станок быстрее проходил через стыки, необходимо увеличить значение этого параметра. Любопытные могут пройти по ссылке и прочитать про алгоритм обработки углов в Grbl, который учитывает и скорость, и величину угла на стыке, простым, эффективным и надежным методом.
$12 = 0.002 (Arc tolerance, millimeters)
Отклонение от дуги, мм
Прошивка Grbl обрабатывает круги, дуги и спирали G2/G3, разбивая их на множество крошечных отрезкой таким образом, чтобы погрешность отклонения от дуги не превышала значения данного параметра. Скорее всего вам никогда не придется менять этот параметр, поскольку значение 0.002мм находится ниже разрешающей способности большинства станков с ЧПУ. Однако, если вы обнаружили, что ваши окружности слишком угловатые или прохождение по дуге выполняется слишком уж медленно, откорректируйте значение этого параметра. Меньшие значение дают лучшую точность, но могут снизить производительность из-за перегрузки Grbl огромным количеством мелких линий. И наоборот, более высокие значения приводят к меньше точности обработки, но могут повысить скорость, поскольку Grbl придется иметь дело в меньшим количеством линий.
$13 = 0 (Report in inches, boolean)
Отчет в дюймах, логический
Прошивка Grbl в реальном времени выводит координаты текущей позиции, чтобы пользователь всегда имел представление, где в данный момент находится станок, а также параметры смещения начала координат и данные измерения щупа. По-умолчанию вывод идет в мм, но командой $13=1 можно изменить значение параметра и переключить вывод на дюймы, $13=0 возвращает вывод в мм.
$20 = 0 (Soft limits enable, boolean)
Мягкие границы, логический
Мягкие границы это настройка безопасности, призванная помочь избежать перемещения за пределы допустимой области, которое может повлечь за собой поломку или разрушение оборудования. Она работает за счет информации о текущем положении и пределах допустимого перемещения по каждой из осей. Каждый раз, когда Grbl отправляется G-код движения, он проверяет не произойдет ли выход за пределы допустимой области. И в случае, если происходит нарушение границ, Grbl, где бы он ни находился, немедленно выполняет команду остановки подачи, останавливает шпиндель и охлаждение, а затем выдает сигнал аварии для индикации проблемы. Текущее положение при этом не сбрасывается, поскольку остановка происходит не в результате аварийного принудительного останова, как в случае с жесткими границами.
ПРИМЕЧАНИЕ: мягкие границы требуют включения поддержки процедуры поиска начальной позиции и аккуратной настройки максимальных границ для перемещения, поскольку Grbl нужно знать где находятся допустимые границы. $20=1 для включения, и $20=0 для отключения.
$21 = 0 (Hard limits enable, boolean)
Жесткие границы, логический
Жесткие границы в общих чертах работают также как и мягкие, но используют аппаратные выключатели. Как правило, вы подсоединяете концевые выключатели (механические, магнитные или оптические) в конце каждой из осей или в тех точках, достижение которых в процессе перемещения, как вы считаете, может привести к проблемам. Когда срабатывает выключатель, он приводит к немедленной остановке любого перемещения, останову охлаждения и шпинделя (если подключен), и переходу в аварийный режим, который требует от вас проверки станка и сброса контроллера.
Для использования жестких границ с Grbl, соответствующие выводы подстраиваются по питанию внутренним резистором, поэтому все, что от вас требуется — подключить нормально разомкнутый концевой выключатель между выводом и землей и задействовать жесткие границы командой $21=1, отключение — командой $21=0.
Необходимо иметь в виду, что срабатывание жестких границ рассматривается как исключительное событие, требующее немедленной остановки, и может привести к потере шагов. Grbl не имеет обратной связи от станка о текущем положении, так что он не может гарантировать, что имеет представление о реальном месте нахождения. Так что если произошло нарушение жестких границ, Grbl перейдет в аварийный режим, давая вам шанс проверить станок и требуя выполнить сброс Grbl, в целях безопасности.
$22 = 0 (Homing cycle enable, boolean)
Поиск начальной позиции, логический
Для тех, кто только знакомится с миром ЧПУ: процедура поиска начальной позиции используется для аккуратного и точного поиска заранее известной точки станка каждый раз после включения Grbl между сеансами работы. Другими словами, вы всегда, в любой момент времени точно знаете где находитесь. Собирались ли вы только начать работу или перешли к следующей операции, а в это время отключилось электричество, в любом случае Grbl перезапустится и не будет знать свое текущее местоположение. Вам остается только выяснять, а где же вы все-таки сейчас находитесь. При наличии начальной позиции, у вас всегда есть эталонная точка отсчета, так что все, что в этом случае требуется, это запустить процедуру поиска начальной точки и продолжить работу с того места, где остановились.
Для настройки процедуры поиска начальной позиции вам потребуется наличие надежно закрепленных концевых выключателей в некоторой точке, на которые нельзя наткнуться или сдвинуть, в противном случае точка отсчета может быть сбита. Обычно они устанавливаются в самых дальних точках в направлении +x, +y, +z на каждой из осей. Соедините концевые выключатели с соответствующими выводами и землей, так же как и концевые выключатели аппаратных границ и задействуйте поиск начальной позиции. Если интересно, то вы можете использовать граничные выключатели и для аппаратных границ, и для поиска начальной позиции, они прекрасно работают вместе.
По-умолчанию, процедура поиска начальной позиции Grbl сначала выполняет перемещение по оси Z в положительном направлении, чтобы освободить рабочую область, а затем выполняет одновременное перемещение по осям X и Y в положительном направлении. Для настройки точного поведения процедуры поиска начальной позиции имеются несколько параметров настройки, описанных ниже (и параметры компиляции тоже.)
ПРИМЕЧАНИЕ: В файле config.h находятся множество других настроек, ориентированных на продвинутых пользователей. Вы можете отключить блокировку при старте, указать с каких осей начать процедуру поиска, в каком порядке по ним перемещаться, а также многое другое.
$23 = 0 (Homing direction invert, mask)
Инверсия направления начальной точки, маска
По-умолчанию, Grbl предполагает, что концевые выключатели начальной точки находятся в положительном направлении, он выполняет сначала перемещение в положительном направлении по оси Z, затем в положительном направлении по осям X-Y, перед тем как точно определить начальную точку медленно перемещаясь назад и вперед около концевого выключателя. Если у вашего станка концевые выключатели находятся в отрицательном направлении, инверсия направлений начальной точки изменяет направление осей. Она работает точно так же, как и инверсия порта шаговых импульсов или инверсии порта направления, все что вам нужно это указать значение из таблицы, указывающее какие оси нужно инвертировать для поиска в противоположном направлении.
$24 = 25.000 (Homing locate feed rate, mm/min)
Скорость подачи при поиске начальной точки, мм/мин
Процедура поиска начальной точки сначала ищет концевые выключатели с повышенной скоростью, а после того как их обнаружит, двигается в начальную точку с пониженной скоростью для точного определения ее положения. Скорость подачи при поиске начальной точки — это та самая пониженная скорость. Установите ее в некоторое значение, обеспечивающее повторяемое и точное определение местоположения начальной точки.
$25 = 500.000 (Homing search seek rate, mm/min)
Скорость поиска начальной точки, мм/мин
Скорость поиска начальной точки — это начальная скорость с которой контроллер пытается найти концевые выключатели начальной точки. Откорректируйте на любое значение, позволяющее переместиться к начальной точке за достаточно малое время без столкновения с концевыми выключателями из-за слишком быстрого к ним перемещения.
$26 = 250 (Homing switch debounce delay, milliseconds)
Подавление дребезга при поиске начальной точки, миллисекунд
Когда срабатывают выключатели, некоторые из них в течении нескольких миллисекунд могут издавать электрический/механический шум приводящий к быстрому переключению сигнала между высоким и низким значениями, прежде чем значение зафиксируется. Для решения данной проблемы нужно подавить дребезг сигнала либо аппаратно, за счет какой-нибудь фильтрации, либо программно, сделав небольшую задержку на время дребезга. Grbl будет делать короткую задержку, но только при поиске начальной точки на этапе ее точного определения. Установите значение задержки, достаточное, чтобы ваши выключатели обеспечивали устойчивый поиск начальной точки. Для большинства случаев подойдут значения 5-25 миллисекунд.
$27 = 1.000 (Homing switch pull-off distance, millimeters)
Отъезд от начальной точки, мм
При объединение датчиков жестких границ станка и концевых выключателей для поиска начальной точки, процедура поиска после завершения определения положения начальной точки выполняет перемещение от концевых выключателей на указанное расстояние. Другими словами, это предотвращает непреднамеренное срабатывание жестких границ по окончании процедуры поиска.
$31 = 0 (Minimum spindle speed, RPM)
Минимальные обороты шпинделя, Об/мин
Задает обороты шпинделя, соответствующие минимальному напряжению на выходе ШИМ, равному 0.02V (0В означает отключение). Меньшие значение оборотов будут приняты Grbl, но напряжение на выходе ШИМ не будет меньше 0.02V, за исключением случая равенства нулю.
$32 = 0 (Laser-mode enable, boolean)
Режим лазера, логический
Если включить этот режим, то Grbl, в случае, когда обороты шпинделя (мощность лазера) меняются командой «S» будет продолжать движение от точки к точке в соответствии с заданной последовательностью команд G1, G2 или G3. Значение скважности ШИМ, отвечающего за управление оборотами шпинделя, будет меняться в процессе движения сразу же, без выполнения остановки. Обязательно прочтите руководство Grbl по работе в режиме лазера и документацию на ваш лазер перед включением данного режима.
Если параметр отключен, то Grbl будет вести себя как обычно, прерывая движение каждый раз, когда встречает команду изменения оборотов шпинделя S. Это стандартное поведение для фрезерных станков, формирующее некоторую паузу, чтобы шпиндель успел изменить скорость своего вращения.
$100 = 250.000 (X-axis travel resolution, step/mm)
$101 = 250.000 (Y-axis travel resolution, step/mm)
$102 = 250.000 (Z-axis travel resolution, step/mm)
Разрешение по осям [X,Y,Z] шагов/мм
Grbl нужно знать на какое расстояние каждый шаг двигателя реально перемещает инструмент.
Мы рассмотрели расчет этого параметра в статье «Расчет значения шагов для станка». Рассчитанные значения для каждой из осей необходимо записать в соотвествующие строки прошивки Grbl.
$110 = 500.000 (X-axis maximum rate, mm/min)
$111 = 500.000 (Y-axis maximum rate, mm/min)
$112 = 500.000 (Z-axis maximum rate, mm/min)
Максимальная скорость, мм/мин
Эти параметры задают максимальную скорость, с которой можно перемещаться по каждой из осей. Самый просто способ найти нужные значения — тестировать каждую ось немного увеличивая скорость и выполняя перемещения.
ПРИМЕЧАНИЕ: Эти значения также определяют максимальную скорость перемещения при выполнении команды G0.
$120 = 10.000 (X-axis acceleration, mm/sec^2)
$121 = 10.000 (Y-axis acceleration, mm/sec^2)
$122 = 10.000 (Z-axis acceleration, mm/sec^2)
Ускорение по осям, мм/сек^2
Эти параметры задают параметры ускорения в мм/сек за секунду. Попросту говоря, меньшее значение делает Grbl более плавным в движении, в то время как большее приводит к боле резким движениям и достижению требуемой скорости подачи гораздо быстрее. Как и в случае максимальных скоростей, каждая из осей имеет свое собственное значение ускорения, которые независимы друг от друга. Это означает, что в случае многоосного перемещения ускорение будет соответствовать самой медленной из движущихся осей.<br>
$130 = 200.000 (X-axis maximum travel, millimeters)
$131 = 200.000 (Y-axis maximum travel, millimeters)
$132 = 200.000 (Z-axis maximum travel, millimeters)
Максимальное перемещение, мм
Эти параметры задает максимальную дистанцию перемещения в мм от одного конца каждой из осей до другого. Используются модулем проверки мягких границ для определения выхода за пределы допустимой области в процессе перемещения.
Для внесения изменений в какой либо параметр прошивки необходимо в командной строке ввести
$x=val
где
$x – параметр для изменения, $0, $1 и т.д.
Val – значение параметра, на которое необходимо изменить текущее значение
после этого нажать Enter. В результате этого новое значение будет сохранено в памяти контроллера.
В предыдущих статьях мы рассмотрели, где скачать прошивку grbl 1.1, как установить данную прошивку и с помощью какой программы производить настройки. Сегодня рассмотрим какие параметры мы получаем от станка. И как произвести настройку grbl 1.1 – инструкция на русском языке.
Включение станка, что за информация нам выдает grbl 1.1?
- В предыдущей статье про Universal G-Code Sender при подключении станка, в консоли программы, мы видели информацию:

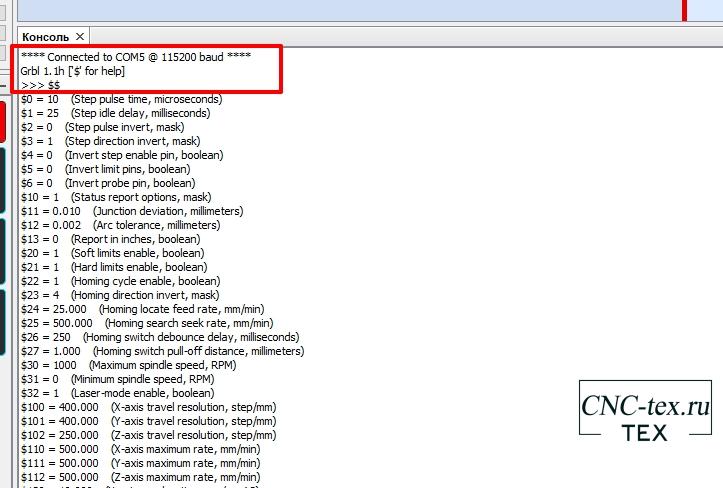
Что означают все эти строки. Давайте рассмотрим их по порядку. Первая строка.
**** Connected to COM5 @ 115200 baud ****
Расшифровать ее можно так:
- порт COM5;
- скорость 115200 бод.
Данные параметры мы выбирали при подключении станка.
Следующая строка выводит информацию о версии прошивки.
Grbl 1.1g [‘$’ for help]
- версия GRBL 1.1g.
- [‘$’ for help] ([‘$’ для справки]) — для получения справки по прошивке GRBL необходимо ввести в командной строке $ и нажать Enter.
Третья строка отправляет команду «$$», что заставляет вывести настройки прошивки.
Следующая команда «$G» — Просмотр состояния парсера gcode. Эта команда выводит все активные режимы gcode в парсере G-кода Grbl. При отправке этой команды в Grbl, он ответит сообщением:
[GC:G0 G54 G17 G21 G90 G94 M0 M5 M9 T0 S0.0 F500.0]
Команды Grbl «$».
Про данные команды Grbl «$» у меня на форуме есть отдельный пост. Но чтобы вам не искать информацию по разным сайтам, продублирую информацию в данной статье.
Команда «$$» выводит все настройки «$» в монитор порта или в консоль управляющей программы.
Введите $ и нажмите Ввод, чтобы Grbl вывел подсказку. Символы $ и Ввод не будут отображаться.
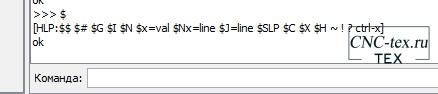
Grbl должен вывести следующее:[HLP:$$ $# $G $I $N $x=val $Nx=line $J=line $SLP $C $X $H ~ ! ? ctrl-x]
‘$’-команды — это системные команды Grbl, используемые для изменения настроек, просмотра или изменения состояний и режимов работы Grbl, а также запуска процедуры поиска начальной позиции.
Последние четыре не-‘$’ команды — это команды управления в реальном времени, которые могут быть отправлены в любой момент, независимо от того, что в настоящее время делает Grbl. Они либо тут же меняют поведение работающего Grbl или сразу же выводят важные в реальном времени данные, например текущие координаты (aka DRO).
Настройки Grbl.
Для просмотра настроек введите «$$» и нажмите Ввод, после того как подключитесь к Grbl. Grbl ответит списком текущий системных настроек, как в примере ниже. Все эти настройки хранятся в памяти EEPROM после отключения питания, так что они будут автоматически загружены при следующем включении вашей платы Arduino.
x или $x=val описывают отдельный параметр настроек, причем val это значение параметра.
В предыдущих версиях Grbl каждый параметр имел после себя описание в круглых скобках (), но в Grbl, начиная с v1.1, этого, к сожалению, больше нет. Так было сделано, чтобы освободить драгоценную flash память для добавления новых возможностей, появившихся в v1.1. Однако, большинство хороших графических оболочек (GUI) добавляют для вас описания к параметрам, так что вы всегда будете знать на что смотрите.
Настройки по умолчанию.
- $0=10 длительность импульса Step, мкс
- $1=25 задержка откл. ШД, мс
- $2=0 Инверсия порта шаговых испульсов
- $3=0 Инверсия направления, маска
- $4=0 Инверсия сигнала включения шаговых двигателей
- $5=0 Инверсия входов концевых выключателей
- $6=0 Инверсия входа контактного датчика, логический
- $10=1 Отчет о состоянии
- $11=0.010 Отклонение на стыках, мм
- $12=0.002 Отклонение от дуги, мм
- $13=0 Отчет в дюймах
- $20=0 Мягкие границы
- $21=0 Жесткие границы
- $22=1 Поиск начальной позиции
- $23=0 Инверсия направления начальной точки
- $24=25.000 Скорость подачи при поиске начальной точки, мм/мин
- $25=500.000 Скорость поиска начальной точки, мм/мин
- $26=250 Подавление дребезга при поиске начальной точки, миллисекунд
- $27=1.000 Отъезд от начальной точки, мм
- $30=1000 Максимальные обороты шпинделя, Об/мин
- $31=0 Минимальные обороты шпинделя, Об/мин
- $32=0 Режим лазера
- $100=250.000 кол-во шагов на мм для оси Х
- $101=250.000 кол-во шагов на мм для оси Y
- $102=250.000 кол-во шагов на мм для оси Z
- $110=500.000 Максимальная скорость оси Х, мм/мин
- $111=500.000 Максимальная скорость оси Y, мм/мин
- $112=500.000 Максимальная скорость оси Z, мм/мин
- $120=10.000 Ускорение оси Х, мм/сек^2
- $121=10.000 Ускорение оси Y, мм/сек^2
- $122=10.000 Ускорение оси Z, мм/сек^2
- $130=200.000 Максимальное перемещение оси Х, мм
- $131=200.000 Максимальное перемещение оси Y, мм
- $132=200.000 Максимальное перемещение оси Z, мм
$x=val — Изменение настроек Grbl.
Команда $x=val сохраняет или изменяет параметр настройки Grbl, это можно сделать вручную, отправкой соответствующей команды в Grbl через программу-терминал последовательного порта, но большинство графических оболочек Grbl позволяют сделать это более удобным способом.
Для ручного изменения, например, длины шагового импульса в микросекундах на значение 10мкс, нужно ввести следующее, завершив команду нажатием клавиши Ввод: $0=10 Если все прошло успешно, Grbl ответит ‘ok’, новые настройки будут сохранены в EEPROM и будут использоваться до следующего их изменения.
Вы можете перепроверить, что Grbl получил и сохранил верное значение параметра, повторно введя команду $$ для просмотра системных настроек.
Описание параметров grbl 1.1.
Примечание! Разница между Grbl v0.9 и Grbl v1.1 заключается только в том, что изменился вывод статуса командой $10 и были добавлены команды для новых параметров $30/ $31 — максимальные/минимальные обороты шпинделя и $32 — работа в режиме лазера. Все остальное — осталось как было.
$0 – Длительность шагового импульса, микросекунд.
Драйверы шаговых двигателей имеют ограничение на минимальную длительность шагового импульса. Уточните нужное значение в документации или просто попробуйте разные варианты. Желательно использовать максимально короткие импульсы, которые драйвер способен надежно распознавать. Если импульсы будут слишком длинные, вы можете столкнуться с проблемами при высоких скоростях подачи и большой частоте импульсов, возникающими из-за того, что идущие подряд импульсы начнут перекрывать друг друга. Мы рекомендуем использовать длительности в районе 10 микросекунд, что является значением по-умолчанию.
$1 — Задержка отключения двигателей, миллисекунд.
Каждый раз, когда ваши шаговые двигатели заканчивают движение и останавливаются, Grbl делает задержку на указанный интервал времени перед отключением питания двигателей. Вы можете всегда держать двигатели включенными (с подачей питания для удержания текущего положения) установив значение этого параметра в максимально возможное значение, равное 255 миллисекунд.
Отключение призвано помочь для тех типов двигателей, которые не следует держать включенными в течении долгого периода времени без какой-либо работы. И еще, имейте в виду, что в процессе отключения некоторые драйверы шаговых двигателей не запоминают на каком микрошаге они остановились, из-за этого вы можете стать свидетелем ‘пропуска шагов’ при отключении/включении двигателей. В этом случае просто держите двигатели всегда включенными с помощью $1=255.
$2 – Инверсия порта шаговых импульсов, маска.
Этот параметр управляет инверсией сигнала шаговых импульсов. По-умолчанию, сигнал шагового импульса начинается в нормально-низком состоянии и переключается в высокое на период импульса. По истечении времени, заданного параметром $0, вывод переключается обратно в низкое состояние, вплоть до следующего испульса. В режиме инверсии, шаговый импульс переключается из нормально-высокого в низкое на период импульса, а потом возвращается обратно в высокое состояние. Большинству пользователей не требуется менять значение этого параметра, но это может оказаться полезным, если конкретные драйверы ШД этого требуют.
$3 – Инверсия порта направления, маска.
Этот параметр инвертирует сигнал направления для каждой из осей. По-умолчанию, Grbl предполагает, что ось движется в положительном направлении, когда уровень сигнала направления низкий, и в отрицательном — когда высокий. Часто оси в некоторых станках движутся не так. Этот параметр изменит инвертирует сигнал направления для тех осей, что движутся в обратную сторону.
- $3=0 Без инверсии осей
- $3=1 Инверсия оси Х
- $3=2 Инверсия оси Y
- $3=3 Инверсия всех осей
$4 — Инверсия сигнала включения шаговых двигателей, логический.
По умолчанию, высокий уровень сигнала включения шаговых двигателей соответствует выключению, а низкий — включению. Если ваша сборка требует обратного, просто инвертируйте сигнал, введя $4=1. Отключается с помощью $4=0. (Может потребоваться перезапуск контроллера чтобы изменения вступили в силу.)
$5 — Инверсия входов концевых выключателей, логический.
По умолчанию, входы концевых выключателей подтягиваются к питанию встроенным резистором подтяжки Arduino. Когда сигнал на входе принимает низкий уровень, Grbl рассматривает это как срабатывание выключателя. Для противоположного поведения, просто инвертируйте входы, введя $5=1. Отключается командой $5=0. Может потребоваться перезапуск контроллера, чтобы изменения вступили в силу.
Если вы инвертируете входы концевых выключателей, потребуется внешний резистор подтяжки к земле, чтобы предотвратить перегрузку по току и сгоранию входа.
$6 — Инверсия входа контактного датчика, логический.
По умолчанию, вход контактного датчика подтягивается к питанию встроенным резистором подтяжки Arduino. Когда сигнал на входе принимает низкий уровень, Grbl рассматривает это как срабатывание датчика. Для противоположного поведения, просто инвертируйте вход контактного датчика, введя $6=1. Отключается командой $6=0. Может потребоваться перезапуск контроллера, чтобы изменения вступили в силу.
Если вы инвертируете вход контактного датчика, потребуется внешний резистор подтяжки к земле, чтобы предотвратить перегрузку по току и сгоранию входа.
$10 — Отчет состояния, маска.
Параметр определяет какие данные реального времени вернет Grbl, когда пользователь запрашивает статус командой ‘?’.
Эти данные включают в себя текущее состояние, текущие координаты, текущую скорость подачи, значения на входах, текущие переопределенные значения, состояния буферов, и номер выполняемой команды G-кода (если было включено при компиляции).
По-умолчанию новая реализация вывода отчета в Grbl v1.1+ включает в себя вывод информации практически обо всем в стандартном выводе статуса. Множество данных скрывается и выводятся только тогда, когда их значение меняется. Это существенно увеличивает производительность по сравнению со старым способом и позволяет значительно быстрее получать обновленные данные о станке, причем в большем объеме. Документация на интерфейс в общих чертах рассказывает, как это работает, хотя в основном она предназначена только для разработчиков GUI или любопытных.Для простоты и удобства, Grbl v1.1 имеет всего две опции для данного параметра. Обе используются пользователями и разработчиками в основном для отладочных целей. Текущие координаты могут быть настроены на вывод либо машинных координат (MPos:), либо рабочих (WPos:), но не обеих одновременно. Например, отчет, содержащий машинные координаты без данных о буфере соответствует параметру $10=1. Рабочие координаты и информация о буфере соответствуют параметру $10=2.
$11 — Отклонение на стыках, мм.
Заданная величина отклонения на стыках, используется модулем управления ускорением для определения как быстро можно перемещаться через стыки отрезков запрограммированного в G-коде пути. Например, если путь в G-коде содержит острый выступ с углом в 10 градусов, и станок двигается к нему на полной скорости, данный параметр поможет определить насколько нужно притормозить, чтобы выполнить поворот без потери шагов.Вычисление делается довольно сложным образом, но в целом, более высокие значение дают более высокую скорость прохождения углов, повышая риск потерять шаги и сбить позиционирование. Меньшие значение делают модуль управления более аккуратным и приводят к более аккуратной и медленной обработке углов. Так что, если вдруг столкнетесь с проблемой слишком быстрой обработкой углов, уменьшите значение параметра, чтобы заставить станок притормаживать перед прохождением углов. Если хотите, чтобы станок быстрее проходил через стыки, увеличьте значение параметра. Любопытные могут пройти по ссылке и прочитать про алгоритм обработки углов в Grbl, который учитывает и скорость, и величину угла на стыке, простым, эффективным и надежным методом.
$12 – Отклонение от дуги, мм.
Grbl выполняет круги, дуги и спирали G2/G3, разбивая их на множество крошечных отрезков таким образом, чтобы погрешность отклонения от дуги не превышала значения данного параметра. Скорее всего вам никогда не придется менять этот параметр, поскольку значение 0.002мм находится ниже разрешающей способности большинства станков с ЧПУ. Однако, если вы обнаружили, что ваши окружности слишком угловатые или прохождение по дуге выполняется слишком уж медленно, откорректируйте значение этого параметра. Меньшие значение дают лучшую точность, но могут снизить производительность из-за перегрузки Grbl огромным количеством мелких линий. И наоборот, более высокие значения приводят к меньше точности обработки, но могут повысить скорость, поскольку Grbl придется иметь дело в меньшим количеством линий.Для любопытных уточним, что отклонение от дуги определяется как максимальная длина перпендикуляра, проведенного от отрезка, соединяющего концы дуги (он же хорда) до пересечения с точкой дуги. Используя основы геометрии мы вычисляем на отрезки какой длины нужно разбить дугу, чтобы погрешность не превышала заданное значение. Моделирование дуг данным способом замечательно в том смысле, что отрезки с точки зрения производительности получаются оптимальной длины, а точность никогда не теряется.
$13 — Отчет в дюймах, boolean.
Grbl в реальном времени выводит координаты текущей позиции, чтобы пользователь всегда имел представление, где в данный момент находится станок, а также параметры смещения начала координат и данные измерения (probing). По-умолчанию вывод идет в мм, но командой $13=1 можно изменить значение параметра и переключить вывод на дюймы. $13=0 возвращает вывод в мм.
$20 — Мягкие границы, логический.
Мягкие границы это настройка безопасности, призванная помочь избежать перемещения далеко за пределы допустимой области, которое может повлечь за собой поломку или разрушение дорогостоящих предметов. Она работает за счет информации о текущем положении и пределах допустимого перемещения по каждой из осей. Каждый раз, когда в Grbl отправляется G-код движения, он проверяет не произойдет ли выход за пределы допустимой области. И в случае, если происходит нарушение границ, Grbl, где бы он ни находился, немедленно выполняет команду приостановки подачи, останавливает шпиндель и охлаждение, а затем выставляет сигнал аварии для индикации проблемы. Текущее положение при этом не сбрасывается, поскольку останов происходит не в результате аварийного принудительного останова, как в случае с жесткими границами.
Мягкие границы требуют включения поддержки процедуры поиска домашней позиции и аккуратной настройки максимальных границ для перемещения, поскольку Grbl нужно знать где находятся допустимые границы. $20=1 для включения, и $20=0 для отключения.
$21 — Жесткие границы, логический.
Жесткие границы в общих чертах работают также как и мягкие, но используют аппаратные выключатели. Как правило, вы подсоединяете концевые выключатели (механические, магнитные или оптические) в конце каждой из осей или в тех точках, достижение которых в процессе перемещения, как вы считаете, может привести к проблемам. Когда срабатывает выключатель, он приводит к немедленной остановке любого перемещения, останову охлаждения и шпинделя (если подключен), и переходу в аварийный режим, требующий от вас проверить станок и выполнить сброс контроллера.Для использования жестких границ с Grbl, соответствующие выводы подтягиваются к питанию внутренним резистором, поэтому все, что от вас требуется — подключить нормально разомкнутый концевой выключатель между выводом и землей и задействовать жесткие границы командой $21=1. (Отключение — командой $21=0.) Мы настоятельно рекомендуем озаботиться подавлением электрических наводок и помех, способных повлиять на измерения. Если хотите проверять границы для обоих концов одной оси, просто подключите два выключателя параллельно между выводом и землей, чтобы срабатывание любого из них приводило к срабатыванию жесткой границы.Имейте в виду, что срабатывание жестких границ рассматривается как исключительное событие, выполняющее немедленный останов, и может приводить к потере шагов. Grbl не имеет никакой обратной связи от станка о текущем положении, так что он не может гарантировать, что имеет представление о том где реально находится. Так что, если произошло нарушение жестких границ, Grbl перейдет в бесконечный цикл режима АВАРИЯ, давая вам шанс проверить станок и требуя выполнить сброс Grbl. Помните, что эта возможность используется исключительно в целях безопасности.
$22 — Поиск начальной позиции, логический.
Для тех, кто только знакомится с миром ЧПУ: процедура поиска начальной позиции используется для аккуратного и точного поиска заранее известной точки станка каждый раз после включения Grbl между сеансами работы. Другими словами, вы всегда, в любой момент времени точно знаете где находитесь. Собирались ли вы только начать работу или перешли к следующей операции, а в это время отключилось электричество, в любом случае Grbl перезапустится и понятия не будет иметь где он сейчас находится. Вам остается только выяснять, а где же вы все-таки сейчас находитесь. При наличии начальной позиции, у вас всегда есть эталонная точка отсчета, так что все, что в этом случае требуется, это запустить процедуру поиска начальной точки и продолжить работу с того места, где остановились.
Для настройки процедуры поиска начальной позиции вам потребуется наличие надежно закрепленных концевых выключателей в некоторой точке, на которые нельзя наткнуться или сдвинуть, в противном случае точка отсчета может быть сбита. Обычно они устанавливаются в самых дальних точках в направлении +x, +y, +z на каждой из осей. Соедините концевые выключатели с соответствующими выводами и землей, так же как и концевые выключатели аппаратных границ и задействуйте поиск начальной позиции. Если интересно, то вы можете использовать граничные выключатели И для аппаратных границ, И для поиска начальной позиции. Они прекрасно работают вместе.По-умолчанию, процедура поиска начальной позиции Grbl сначала выполняет перемещение по оси Z в положительном направлении, чтобы освободить рабочую область, а затем выполняет одновременное перемещение по осям X и Y в положительном направлении. Для настройки точного поведения процедуры поиска начальной позиции имеются несколько параметров настройки, описанных ниже (и параметры компиляции тоже.)Также следует отметить, что при задействованной процедуре поиска начальной позиции Grbl блокирует выполнение команд перемещения G-кода до выполнения поиска начальной позиции. Имеется в виду отсутствие перемещения по осям, пока не будет отключена блокировка ($X), но об этом чуть позже. Большинство, если не все контроллеры с ЧПУ, ведут себя аналогично, делается это, в основном, для безопасности, чтобы не позволить оператору допустить ошибку позиционирования, что довольно просто, и расстроиться, когда работа будет загублена. Если вас это раздражает или вы обнаружили какие-то странные ошибки, пожалуйста, дайте нам знать, и мы попытаемся поработать над этим и сделать так, чтобы все были счастливы.
В файле config.h находятся множество других настроек, ориентированных на продвинутых пользователей. Вы можете отключить блокировку при старте, указать с каких осей начать процедуру поиска, в каком порядке по ним перемещаться, а также многое другое.
$23 — Инверсия направления начальной точки, маска.
По-умолчанию, Grbl предполагает, что концевые выключатели начальной точки находятся в положительном направлении, он выполняет сначала перемещение в положительном направлении по оси Z, затем в положительном направлении по осям X-Y, перед тем как точно определить начальную точку медленно перемещаясь назад и вперед около концевого выключателя. Если у вашего станка концевые выключатели находятся в отрицательном направлении, инверсия направления начальной точки изменяет направление осей. Она работает точно так же, как и макси инверсии порта шаговых импульсов или инверсии порта направления, все что вам нужно это указать значение из таблицы, указывающее какие оси нужно инвертировать для поиска в противоположном направлении.
$24 — Скорость подачи при поиске начальной точки, мм/мин.
Процедура поиска начальной точки сначала ищет концевые выключатели с повышенной скоростью, а после того как их обнаружит, двигается в начальную точку с пониженной скоростью для точного определения ее положения. Скорость подачи при поиске начальной точки — это та самая пониженная скорость. Установите ее в некоторое значение, обеспечивающее повторяемое и точное определение местоположения начальной точки.
$25 — Скорость поиска начальной точки, мм/мин.
Скорость поиска начальной точки — это начальная скорость с которой контроллер пытается найти концевые выключатели начальной точки. Откорректируйте на любое значение, позволяющее переместиться к начальной точке за достаточно малое время без столкновения с концевыми выключателями из-за слишком быстрого к ним перемещения.
$26 — Подавление дребезга при поиске начальной точки, миллисекунд.
Когда срабатывают выключатели, некоторые из них в течении нескольких миллисекунд могут издавать электрический/механический шум приводящий к быстрому переключению сигнала между высоким и низким значениями, прежде чем значение зафиксируется. Для решения данной проблемы нужно подавить дребезг сигнала либо аппаратно, за счет какой-нибудь фильтрации, либо программно, сделав небольшую задержку на время дребезга. Grbl будет делать короткую задержку, но только при поиске начальной точки на этапе ее точного определения. Установите значение задержки, достаточное, чтобы ваши выключатели обеспечивали устойчивый поиск начальной точки. Для большинства случаев подойдут значения 5-25 миллисекунд.
$27 — Отъезд от начальной точки, мм.
Чтобы сосуществовать с возможностью отслеживания жестких границ, в случаях, когда для поиска начальной точки используются те же концевые выключатели, процедура поиска после завершения определения положения начальной точки выполняет перемещение от концевых выключателей на указанное расстояние. Другими словами, это предотвращает непреднамеренное срабатывание жестких границ по окончании процедуры поиска.
$30 — Максимальные обороты шпинделя, Об/мин.
Задает обороты шпинделя, соответствующие максимальному напряжению на выходе ШИМ, равному 5В. Допускается задавать в программе и более высокие обороты шпинделя, но вывод ШИМ все равно не может быть больше 5В. По-умолчанию, Grbl строит линейную зависимость из 255 отсчетов между максимальными-минимальными оборотами шпинделя и напряжениями на выходе ШИМ из диапазона 5В-0.02В. Значение ШИМ, равное 0В, означает отключение шпинделя. В файле config.h есть дополнительные параметры, влияющие на это поведение.
$31 — Минимальные обороты шпинделя, Об/мин.
Задает обороты шпинделя, соответствующие минимальному напряжению на выходе ШИМ, равному 0.02V (0В означает отключение). Меньшие значение оборотов будут приняты Grbl, но напряжение на выходе ШИМ не будет меньше 0.02V, за исключением случая равенства нулю. Если равно 0, то шпиндель отключен и выход ШИМ всегда равен 0В.
$32 — Режим лазера, логический.
Если включен, то Grbl, в случае, когда обороты шпинделя (мощность лазера) меняются командой S, будет продолжать движение от точки к точке в соответствии с заданной последовательностью команд G1, G2, или G3. Значение скважности ШИМ, отвечающего за управление оборотами шпинделя, будет меняться в процессе движения сразу же, без выполнения остановки. Обязательно прочтите руководство Grbl по работе в режиме лазера и документацию на ваш лазер перед включением данного режима. Лазеры очень опасны. Они могут мгновенно лишить вас зрения или стать причиной пожара. Grbl, как и указано в его GPL лицензии, не несет никакой ответственности за любой вред, нанесенный в результате использования данной программы.Если параметр отключен, то Grbl будет вести себя как обычно, прерывая движение каждый раз, когда встречает команду изменения оборотов шпинделя S. Это стандартное поведение для фрезеровальных станков, формирующее некоторую паузу, чтобы шпиндель успел изменить скорость своего вращения.
$100, $101, $102 – [X,Y,Z] шагов/мм.
Grbl нужно знать на какое расстояние каждый шаг двигателя в реальности перемещает инструмент. Для калибровки соотношения шагов/мм для вашего станка вам нужно знать следующее: Перемещение в мм, соответствующее одному обороту вашего двигателя. Это зависит от размера шестерней ременной передачи или шага винта. Количество полных шагов на один оборот двигателя (обычно 200). Количество микрошагов на один шаг для вашего контроллера (обычно 1, 2, 4, 8, или 16).
Совет: Использование больших значений микрошага (например, 16) может уменьшить крутящий момент вашего двигателя, так что используйте минимальное значение, обеспечивающее нужную точность перемещения по осям и удобные эксплуатационные характеристики.
После этого значение шаг/мм может быть вычислено по формуле: шагов_на_мм = (шагов_на_оборот*микрошагов)/мм_на_оборот. Рассчитайте данные значения для каждой из осей и запишите настройки в Grbl.
$110, $111, $112 – [X,Y,Z] Максимальная скорость, мм/мин.
Эти параметры задают максимальную скорость, с которой можно перемещаться по каждой из осей. Когда Grbl планирует перемещение, он проверяет индивидуально для каждой из осей, будет или нет превышена ее максимальная скорость. Если будет, что он замедлит движение, чтобы максимальное значение скорости не превышалось. Это означает, что каждая из осей имеет свою максимальную скорость, что необычайно полезно для ограничения скорости, как правило, более медленной оси Z. Самый просто способ найти нужные значения — тестировать каждую ось раз за разом немного увеличивая скорость и выполняя действие перемещения.
Например, для проверки оси X, отправьте Grbl команду вида G0 X50 с расстоянием перемещения, достаточно большим для разгона до максимальной скорости. Максимальное значение будет достигнуто, когда ваш шаговый двигатель застопорится. Он будет издавать жужжащий звук, но ничего страшного с ним не случится. Задайте значение на 10-20% меньше обнаруженного, чтобы учесть износ, трение и массу вашей рабочей головки/инструмента. Повторите процесс для остальных осей.
Эти значения также определяют максимальную скорость перемещения при выполнении команды G0.
$120, $121, $122 – [X,Y,Z] Ускорение, мм/сек^2.
Эти параметры задают параметры ускорения в мм/сек за секунду. Попросту говоря, меньшее значение делает Grbl более плавным в движении, в то время как большее приводит к боле резким движениям и достижению требуемой скорости подачи гораздо быстрее. Как и в случае максимальных скоростей, каждая из осей имеет свое собственное значение ускорения, которые независимы друг от друга. Это означает, что в случае многоосевого перемещения ускорение будет соответствовать самой медленной из движущихся осей. И опять, как и в случает с максимальными скоростями, самый простой способ определить значение этих параметров — индивидуально протестировать каждую из осей, медленно увеличивая значения, пока мотор не застопорится. Завершите настройку сохранением значения на 10-20% меньшим от обнаруженного. Это позволит учесть износ, трение и инертность массы. Мы настоятельно рекомендуем в черновую протестировать некоторое количество программ на G-коде, прежде чем окончательно остановиться на выбранных значениях. Иногда нагрузка на ваш станок может оказаться иной при одновременном перемещении по нескольким осям.
$130, $131, $132 – [X,Y,Z] Максимальное перемещение, мм.
Эти параметры задают максимальную дистанцию перемещения в мм от одного конца каждой из осей до другого. Они имеет смысл только если вы задействовали мягкие границы (и поиск начальной точки), поскольку используются только модулем проверки мягких границ для определения выхода за пределы допустимой области в процессе перемещения.
Параметров много, но настройка достаточно простая. Достаточно внимательно ознакомиться с инструкцией и посмотреть примеры настроек мох самодельных ЧПУ станков.
Фотографии к статье
Файлы для скачивания
| Прошивка GRBL 1.1.zip | 300 Kb | 4340 | Скачать |
На чтение 15 мин. Опубликовано 28 апреля, 2023
Содержание
- Станок CNC — Инструкция по эксплуатации
- Самодельный ЧПУ станок
- Разделы сайта
- Интересное предложение
- Лучшее
- Статистика
- Характеристики ЧПУ гравера 3018
- Распаковка и внешний вид
- Программное обеспечение
- Решение дополнительных проблем, которые не сразу бросаются в глаза
Станок CNC — Инструкция по эксплуатации
CNC инструкция по эксплуатации
Пожалуйста, обратитесь к «Инструкции по сборке» для сборки станка (скачать можно в данном разделе https://minichpu.ru/page/1279409).
2. Отладка (для начала скачайте «Полный пакет» в разделе https://minichpu.ru/page/1279409).
Для начала необходимо подключить плату к сети с помощью болка питания, а также соединить плату с компьютером (ноутбуком) с помощью кабеля USB, входящего в комплект.
— Установить драйвер CH 340 SER (путь- / driver /).
— Открываем двойным нажатием, появляется сообщение
«Разрешить этому приложению вносить изменения на вашем устройстве?»
Нажимаем INSTALL , драйвер устанавливается, и появляется окно, что успешно установлен ( Driver install success !), нажимаем ОК. И закрываем окно.
Определение COM-порта компьютера (для инфо):
- Windows XP: Щелкните правой кнопкой мыши на «мой компьютер», выберите «Свойства», выберите «Диспетчер устройств».
- Windows 7: Нажмите «Пуск» -> щелкните правой кнопкой мыши «компьютер» -> выберите «Управление» -> выберите «Диспетчер устройств» из левой панели.
- В дереве разверните «порты (COM & LPT)»
- Ваш станок будет USB последовательный порт (СОМХ), где “X” представляет собой номер COM порта, например СОМ6.
- Если есть несколько USB-портов, щелкните каждый из них и проверить производителя, станок будет «CH340».
3. Раскройте контрольную программу grblControl . exe , чтобы соединить станок и выбрать правильный порт :
— Открываем двойным нажатием, (станок должен быть подключен и в сеть и через USB ).
— Выбираем в меню Сервис ->Настройки, далее Порт (обновляем, и из выплывающего меню выбираем другой порт), нажимаем ОК. Статус меняется на ГОТОВ.
(изначально Статус – Нет соединения)
В консоле (внизу): Соединение успешно установлено : [ CTRL + X ] Grbl 0.9 j [‘$’ for help ]
4. Проверить направление оси XYZ :
Если ось x , y , z не двигается, как показано на рисунке, просто подключите провод шагового двигателя в обратном направлении.
Как обнулить положение гравера:
5. После установки станка, откройте файл гравировки — приложение «grblControl.exe» (путь- 3018/software/GRBL/grblControl). В правом верхнем углу статус должен быть ГОТОВ. Необходимо определить, где будет находится нулевая точка. Обычно в левом нижнем углу заготовки.
Сначала подведите шпиндель в левый нижний угол заготовки (с помощью кнопок перемещения X и Y ), затем опустите фрезу по оси Z . Замедлить движение можно уменьшив шаг, нажатием кнопок 0,01; 0,1; 1; 5; 10 (расположенные ниже стрелок перемещения).
Когда резец будут приближаться к заготовке, аккуратно подведите его к поверхности заготовки.
Важно! После соприкосновения резца с поверхностью, нажмите в разделе управление кнопки «Обнулить XY » и «Обнулить Z «.
Подсказка: лучше всего опробовать станок на работоспособность без заготовки. Для вращения шпинделя нажмите кнопку «Вкл/Выкл шпиндель», также можно изменять скорость вращения. Произведите перемещение по всем осям. Для возвращения в нулевую точку необходимо нажать кнопку в управлении «Восстановить XYZ «.
Проверьте станок, прежде чем начать официальную гравировку.
6. Загрузка файла в управляющую программу grblControl .
Затем вы можете нажать кнопку «Открыть» в нижнем углу, выбрать из папки » NCfile » готовый файл (с расширением *. nc ), чтобы выгравировать.
7. В папке хранятся готовые файлы.
Этапы работы станков с ЧПУ:
1) формируется модель с помощью специальных графических программ (ArtCam и т.д.) на компьютере.
2) с помощью специальной программы для станка с ЧПУ готовая модель отцифровывается в управляющую программу с расширением *. nc .
3) потом файл открывают управляющей программой « grblControl . exe » и вносят в память ЧПУ. И станок приступает к работе.
Изучайте графическую программу ArtCam, создавайте модели и реализовывайте их с помощью станка CNC 3018.
Источник
Самодельный ЧПУ станок
Разделы сайта
Интересное предложение
Лучшее
Статистика
Всем привет! После того как наигрался с 3Д принтерами, начал засматриваться на ЧПУ станки и оказалось, что логика у них гораздо проще, чего не скажешь по существующим обзорам. Серьезно, первый принтер я собирал пол дня и несколько дней подкручивал, обозреваемый станок же запустил через несколько часов после вскрытия коробки. В данном обзоре постараюсь доказать, что с управлением сможет справиться каждый, разберем возможные проблемы и пути их решения, а так же посмотрим на результаты работы.
Характеристики ЧПУ гравера 3018

- Модель: Mini CNC3018
- Материал корпуса: Алюминиевый сплав
- Цвет: Серебристый
- Занимаемое пространство: около 340×160мм
- Рабочая зона: 340x160x40мм
- Вес: 7.5кг
- Программа для управления: GrblControl
- Поддерживаемые операционные системы: Windows XP SP3, Win7, Win8, Win10.
- Напряжение питания адаптера: 110-240В 50/60Гц
- Выход адаптера: 24В 4А
- Шаговые двигатели: 42 шага, 12В, 1.3A, 0.25Нм
- Двигатель шпинделя: 775(12-36В); 24В: 7000об/мин, 36В: 9000об/мин
- Вал двигателя: 5мм
Распаковка и внешний вид

Верхняя часть прикрыта пенопластом
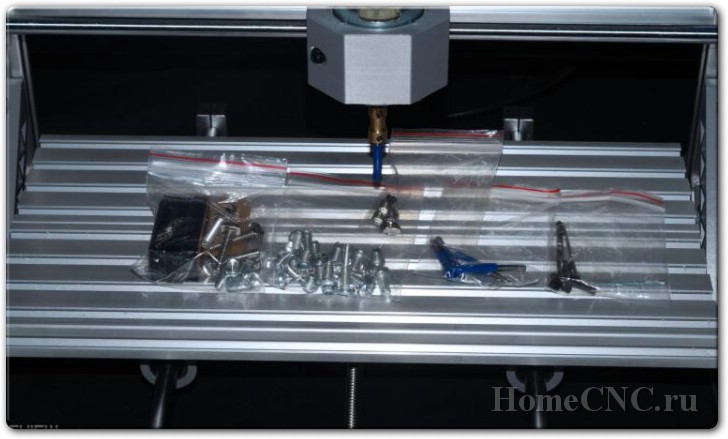
Под ней поролонка с вырезами, все комплектующие аккуратно разложены по своим местам


Высыпаем все на пол, берем отвертку
На самом деле это проще, чем нарисовать сову
В комплекте есть подробная инструкция, но даже без нее сложно собрать конструкцию иначе, т.к. профиля всего три размера, при чем два из них представлены в двух экземплярах. Хотя наверное все же стоит приложить подробное видео сборки
Когда будете фиксировать плату, обратите внимание, что в левом нижнем углу под гайкой окажутся две дорожки и если переусердствовать, можно их закоротить. Чтобы этого не произошло, используйте пятую пластиковую шайбочку из комплекта, она не запасная.

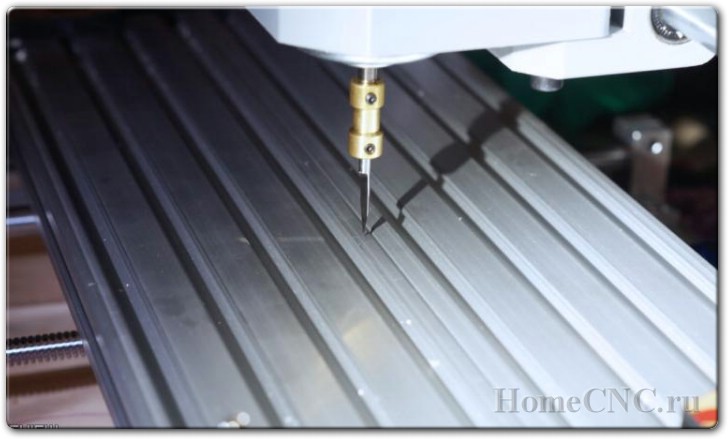
Во время сборки механизма оси X я зафиксировал одну из комплектных фрез и опустил каретку практически впритык к поверхности стола. Так удобнее работать с тонким материалом, но можно так не извращаться, главное чтобы при полном опускании шпинделя фреза не начинала ковырять стол, т.к. это чревато последствиями.
Вот что у меня осталось в итоге после полной сборки, если у Вас деталей больше, проверьте все ли на месте
Фрезы с разными маркировками, но на вид идентичны

Кстати, занятные акриловые фиксаторы, я зажимал ими заготовки до 20мм высотой

Программное обеспечение
На странице лота есть ссылка со всем необходимым для начала
Основой является grblControl_0.8.1, эта программа представляет из себя панель управления станком и именно она дает команды узлам станка. Это как Repetier без модулей для слайсинга в 3д печати

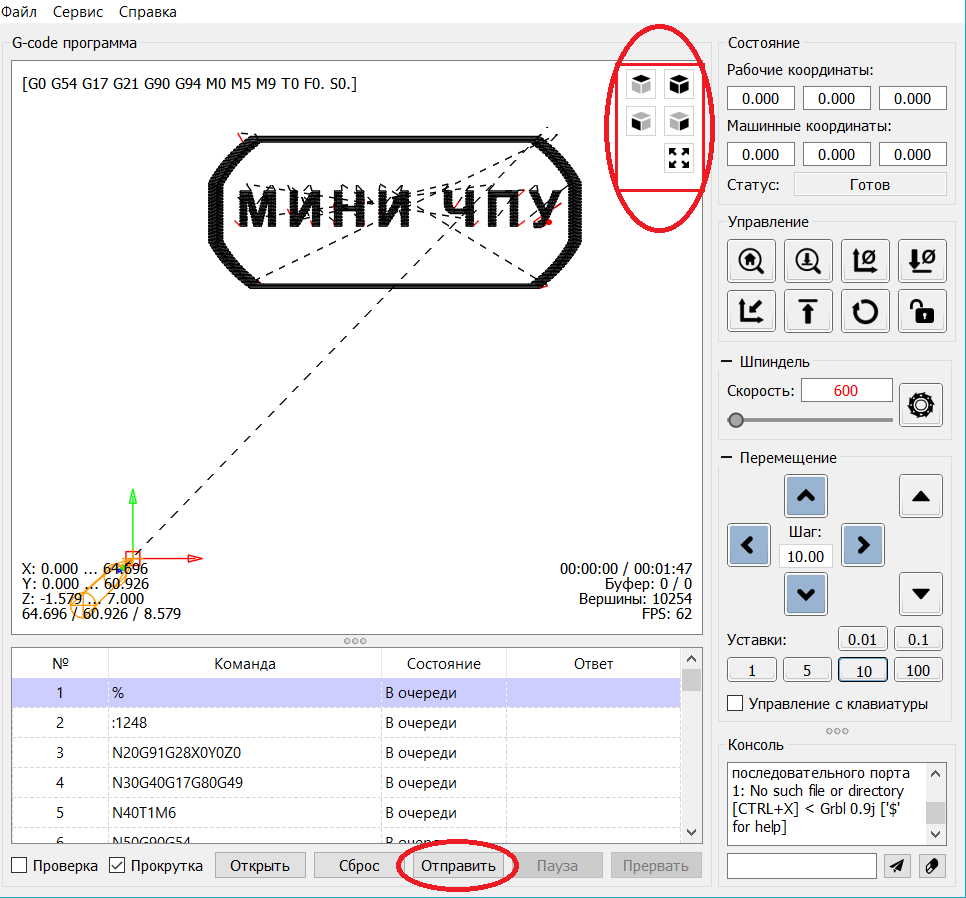
Тем не менее мы уже можем провести первый тест, т.к. в архиве есть уже готовые шаблоны
Выбираем нужный, с помощью кнопок панели управления подводим кончик фрезы к нулевой точке, то есть в нижний левый угол заготовки с касанием поверхности и обнуляем координаты по осям X,Y и Z, после чего нажимаем кнопку отправить.
Процесс пошел, но как-то не правильно. Проход зеркальный и вместо поднятия фрезы станок ее утапливает

Хорошо, что я не оставлял большого запаса хода ниже поверхности стола
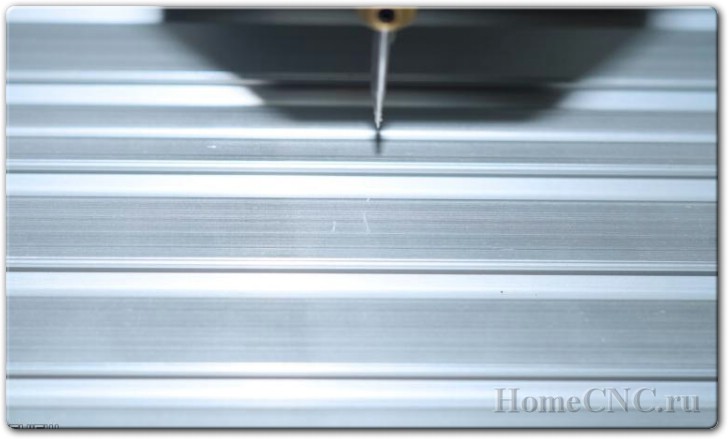
Судя по поведению, нам нужно инвертировать оси X и Z. В этом нет ничего сложного, не нужно перекидывать пины шаговиков или качать другой софт, достаточно откорректировать данные в памяти через консоль. За инверсию осей отвечает команда $3:
Сдвигаем шпиндель выше и правее, обнуляем рабочую область и отправляем в работу. Для теста на картонке сносно
Если удалось нацарапать тестовую модель, можно попробовать и самому чего-нибудь накидать
Для этого нам понадобится любой графический редактор, подойдет тот же Paint, главное чтобы рисунок или текст были монохромными. Рисунок нужно будет сохранить в формате BMP
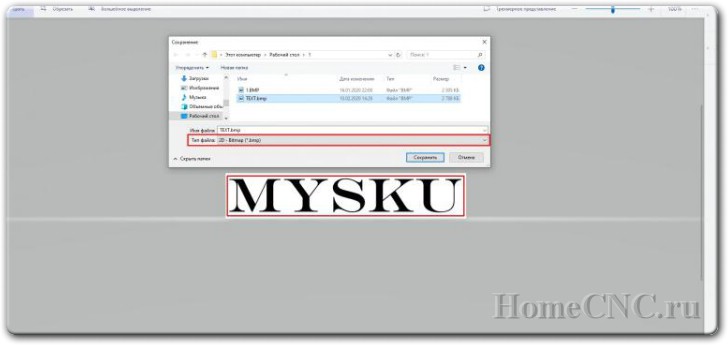
Далее скачиваем бесплатную программу StepCam , открываем нашу картинку, настраиваем основные параметры обработки, такие как скорость прохода и максимальная глубина, ждем пока заполнится полоса прогресса и сохраняем код соответствующей кнопкой
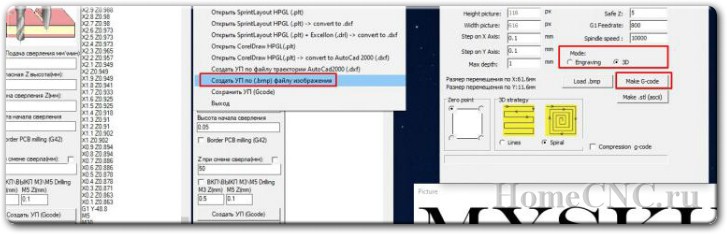
Подгружаем его в grblControl и получаем такой предварительный результат
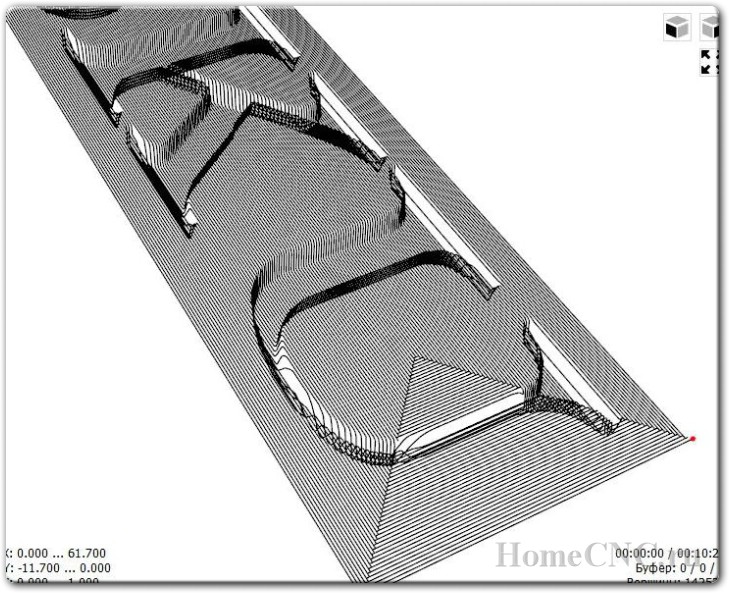
Фон так же утапливает, но буквально на десятую миллиметра, так что можно до обнуления просто слегка приподнять гравер над поверхностью. Программа работает с любыми черно-белыми изображениями, но просчет занимает продолжительное время, например, на обработку данной надписи ушло около 10 минут. Хотя учитывая, что StepCam создавался исключительно для фрезеровки и рассверловки плат, результат неплохой.
Есть другой вариант, Image to Gcode , которая работает по похожему принципу, но несколько быстрее и включает в себя полноценный редактор. Создаем рабочую область, пишем/рисуем, нажимаем «Конвертировать в G-Code», вносим параметры задания
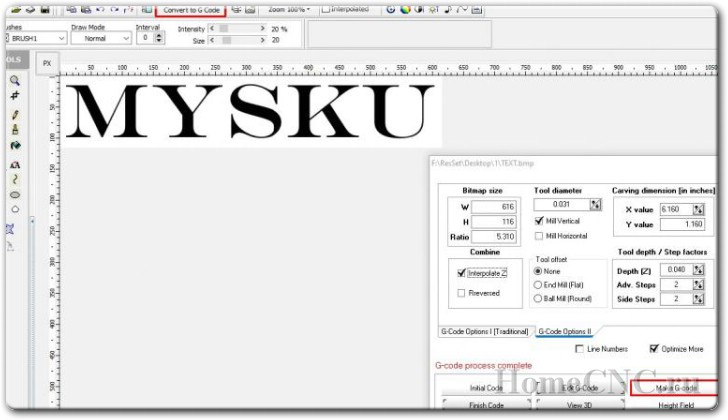
И получаем аналогичный результат за 10 секунд
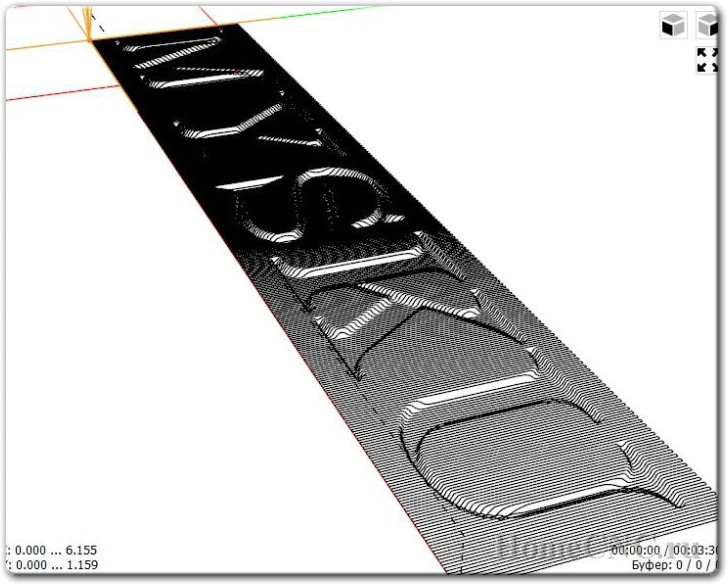
Обе программы строят карту высот по градации серого, где белый цвет это наивысшая точка, а черный низшая
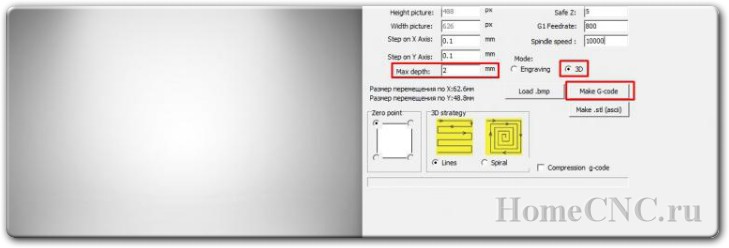
Правда во второй все в дюймах, так что результат малость отличается
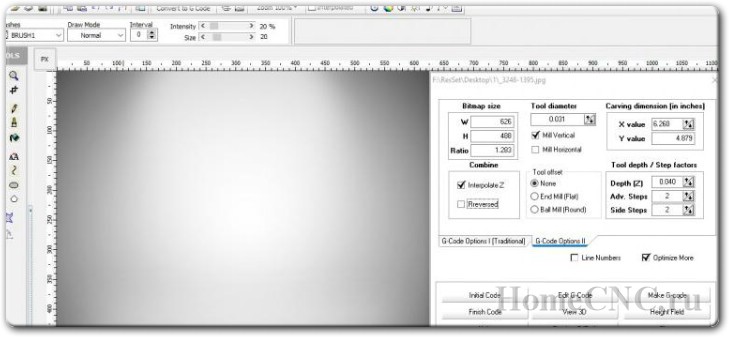
Но что в первом случае видно бугор по центру
Что во втором. Ловил ракурс чтобы линии хоть немного начали отливать
Так что вот таким набором уже вполне можно работать
По крайней мере гравировка не будет доставлять каких-то проблем, а SepCam еще и со Spring Layout отлично работает(изначально под нее и делали).
Накидываем плату в программе, экспортируем пропил дорожек
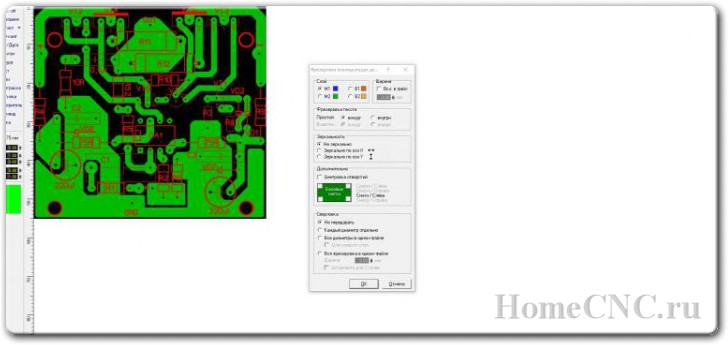

При желании можно выгрузить и рассверловку
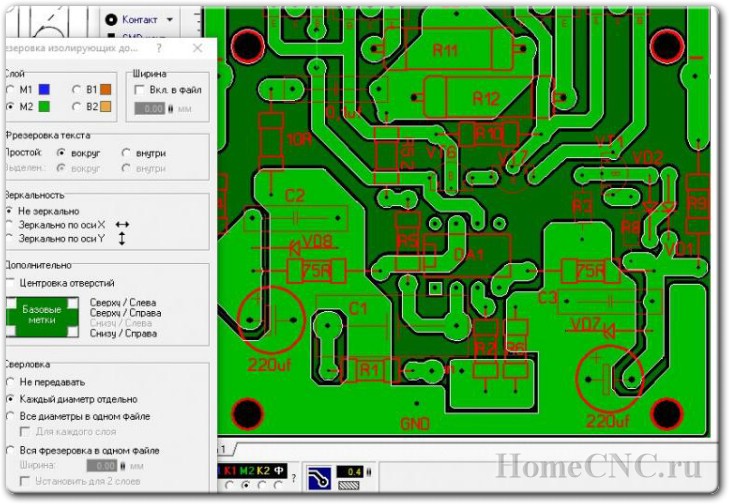
Открыть после фрезеровки данный файл, сменить инструмент и отправить в работу. Удобно, что после завершения задания текущие координаты и «нули» не сбрасываются, так что можно производить последующие манипуляции без повторной калибровки, разве что поправить ось Z если вторая фреза имеет другую длину.
Image to Gcode умеет «выдавливать» черно-белые картинки по градациям серого, но правильно подготовить детальный рельеф довольно сложно. Настолько, что проще использовать более сложный софт.
Я остановился на Vectric Aspire . Программа сильно платная, но есть триальная версия, так что можно попробовать и подумать, надо оно вам или нет.
Вообще гравировка рисунка или надписи тут проще.
Для начала создаем проект, задаем размер нашей «болванки» и нулевую точку. Мне удобнее выставлять ее по центру, потом достаточно найти центр бруска и калибровать по нему
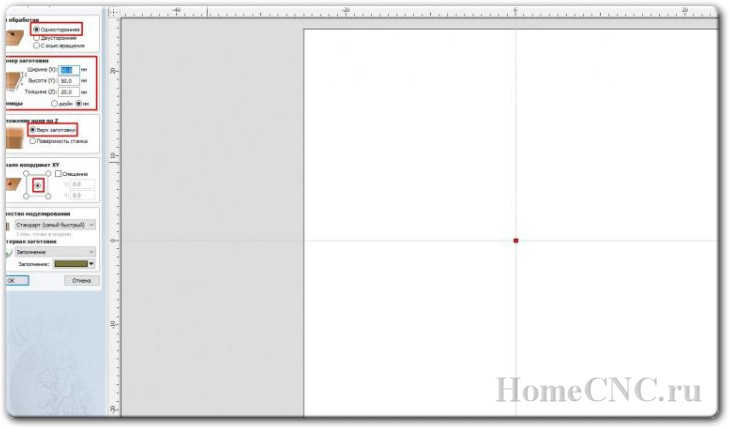
Перетаскиваем нужную нам картинку и нажимаем на векторизацию
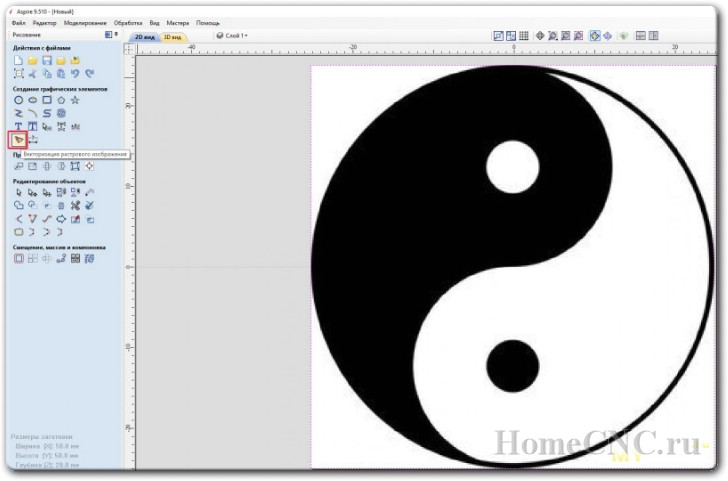
Подбираем параметры так, чтобы заполнились только нужные нам участки
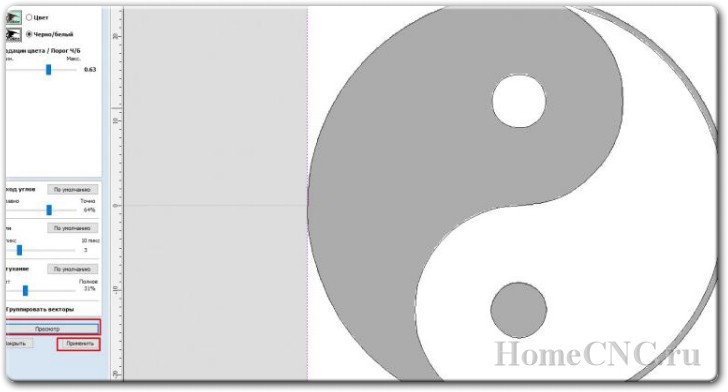
Готово, теперь нужно выбрать нужный тип обработки. Я пользуюсь чаще вот этими
Первый тип: фрезеровка по контуру, внутреннее заполнение игнорируется, задаем нужную глубину, инструмент
И получаем контур рисунка
Далее фрезеровка выемки, настройки самую малость отличаются

В этом случае контур утапливается
Третий режим: Конус/Гравировка, в отличии от Выемки тут нельзя задать несколько проходов, все делается за один на указанную глубину, так что я использую его в основном для вырезания тонких заготовок
Результат похож на выемку при тех же параметрах
Ну и призма может пригодиться
Хотя картинка не очень удачная для примера
Захотел я сделать гравировку на алюминиевой поверхности. Если выбрать Конус/Гравировку, глубина будет небольшой, буквально десятая миллиметра, а вот фрезеровка выемки может легко выгрызать пол миллиметра за пять проходов по 0,1мм, на ней и остановился. Сделал надпись, выбрал инструмент, прогнал в визуализаторе
Сохранил шаблон. Кстати, с постпроцессорами так и не разобрался. Anderson работает вроде адекватно, но на всякий случай запускаю шпиндель вручную, т.к. после перезапуска задания пару кончиков обломал
Поставил концевую фрезу 0.8 мм и сломал ее, т.к. после дерева забыл снизить скорость подачи
Взял обломанную комплектную, кончик был как раз около 0.8мм, так что не пришлось ничего переделывать
Первая буква без проблем, скорость прохода 1мм/сек

Процесс занял часа полтора, но завершился успешно. Каша образовывалась из-за добавления смазки, но думаю это было лишним. Нагрузка на фрезу небольшая, нагрев не ощущался
Протер наждачкой, чем несколько испортил вид поверхности. Мелкой не было.

Ну и тряпочкой прошелся по канавкам
Да, последнюю букву срезало, т.к. нулевую точку во время теста поставил в нижнем левом углу и не рассчитал отступ.
Так же Aspire умеет работать с STL моделями. Для этого создадим рабочую область
Заходим в Файл — Импорт — Компонента/3Д модели и выбираем STL файл
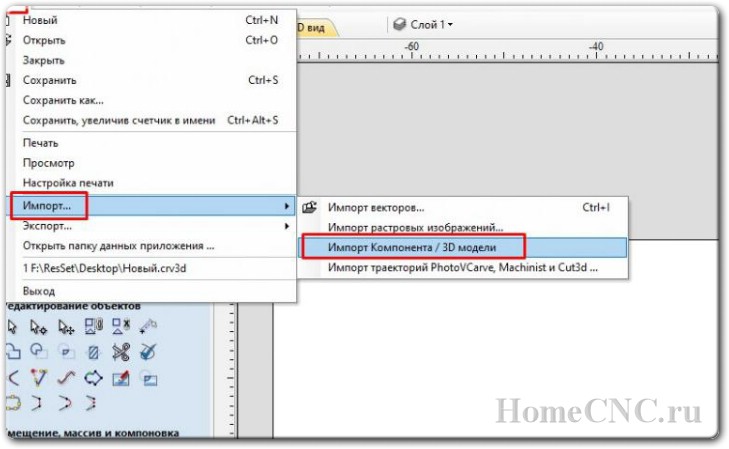
Подгоняем размеры модели под заготовку, центруем и смотрим чтобы не срезало чего нужного
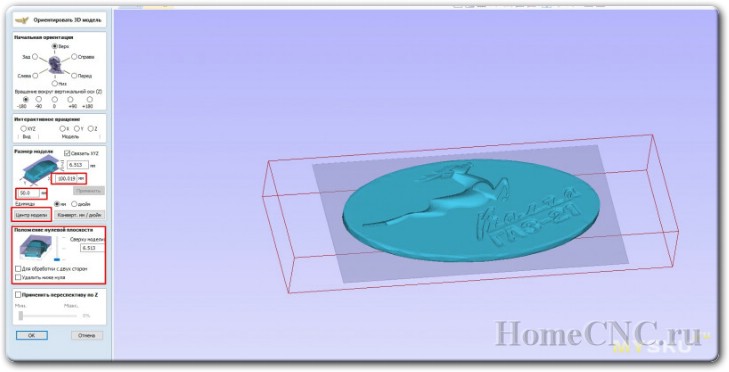
Используются другие обработки, черновая и чистовая. Первая позволяет быстро убрать лишний материал там, где не будет много деталей и заметно ускорить процесс. Если поверхность грубая, грязная или не ровная, можно утопить модель над поверхностью стола. Я использовал доску, которую нашел в сухом гараже, поэтому опустил только на 0,1 мм, думаю этого хватит
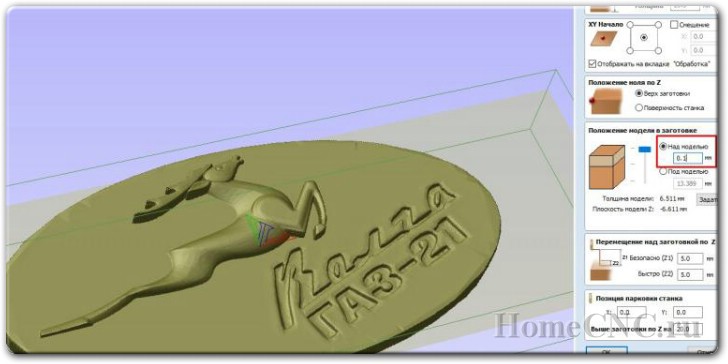
Далее выбираем инструмент, ограничение зоны по материалу, наклон растра
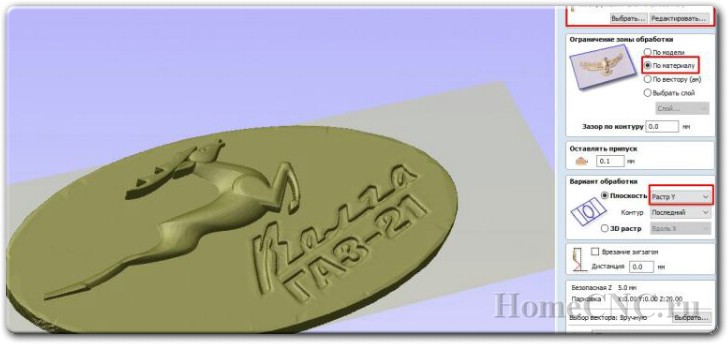
И просчитываем в визуализаторе
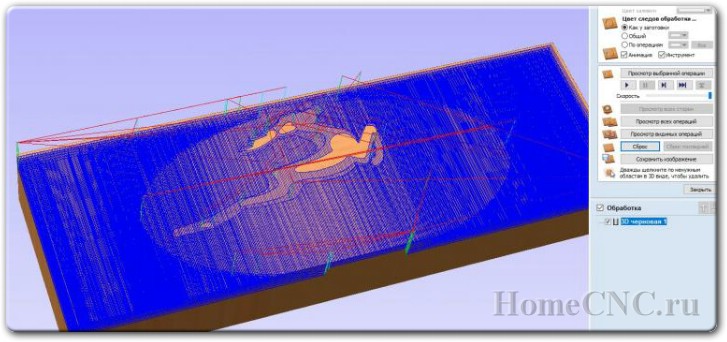
Потом то же самое проделываем для чистовой обработки. Выбираем мелкий гравер и путь обработки. Неплохо показала себя спираль, но иногда удобнее растр и тут тоже нужно следить за направлением, иначе можно получить много «кучеряшек». Обратите внимание, чистовая обработка всегда совершает один проход

Смотрим визуализатор, вроде все хорошо
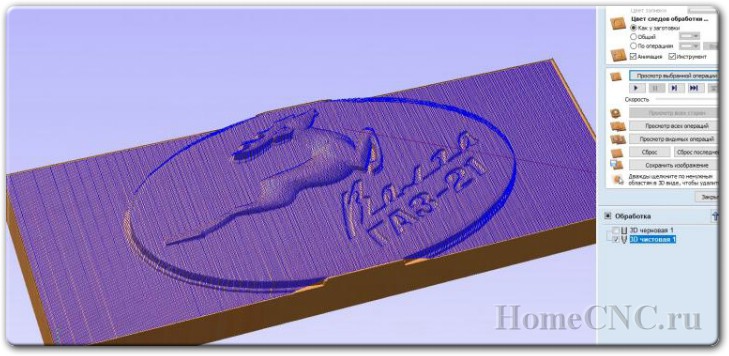
Сохраняем отдельно два файла под черновую и чистовую обработку, т.к. автоматической смены инструмента у нас нет
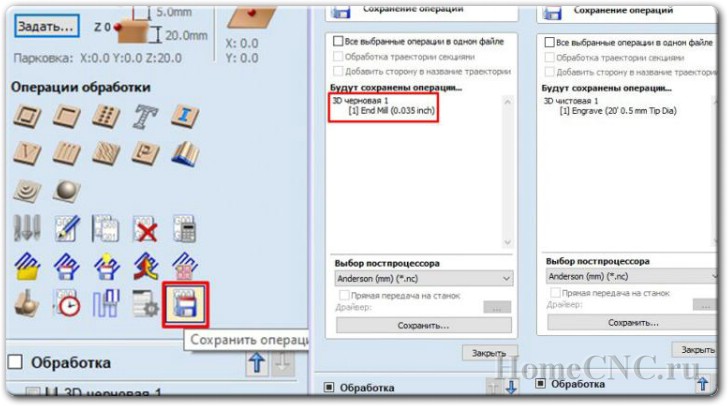
Закидываем в grblControl первый файл, калибруем нули осей в центре заготовки с касанием поверхности и отправляем задание в работу. При ускорении многие кадры смазались, но что поделать, размер гифок ограничен.
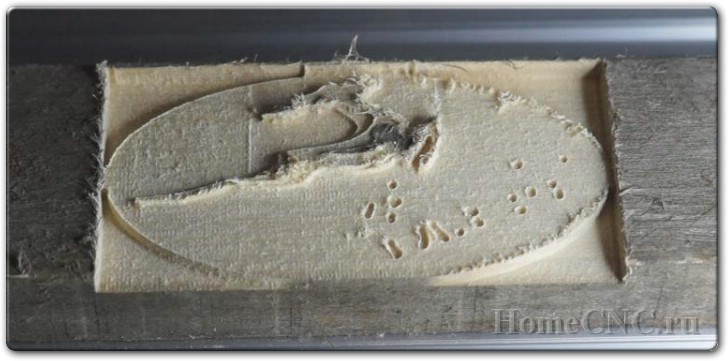
Далее чистовик с неправильно настроенным углом растра(0 градусов). Фреза оказалась короче предыдущей, так что пришлось повторно обнулить ось Z, тут главное не сбивать X с Y, иначе потом будет сложно поймать нужные координаты.

Чтобы не переделывать, подготовил шаблон с правильным углом как на скринах выше и обнулил ось Z еще на 0.1мм ниже, таким образом фреза просто сняла ворсистость практически не утапливая рельеф. Ну и раз углубление небольшое, можно хорошо так увеличить скорость прохода

Уже лучше, но 0,1мм оказалось местами маловато, так что нужно было брать чуть больше, ну или изначально правильно настраивать растр, чтобы потом не возиться
Можно сохранять черновую и чистовую обработку если не планируется смена инструмента.
Это была первая обработка по модели, поэтому были допущены несколько ошибок:
— Растр черновика по оси X, из-за этого полезли волокна
— Не «утопил» модель, поэтому вершины оказались на поверхности и имеют не очень эстетичный вид
Ну и в чистовике была использована спиральная обработка. Квадратная, т.к. ориентируется на форму болванки

Облил «цапоном», но эффект конечно не тот, сосна вообще не лучший материал для украшательств
Кстати, недавно пришлось срочно восстанавливать работоспособность вентилятора. Корпус был неразборным, так что в качестве временного решения можно просверлить отверстие в двойной стенке и добавить смазки. С помощью станка получилось сделать это аккуратнее. Нарисовал окружность диаметром 5мм, углубление 0,5 мм
Три прохода и доступ к трущимся деталям получен, после внесения смазки(неплохо показала себя мобил для вентиляторов) можно использовать срезанные круги в качестве заглушек, сверху лепим стоковую наклейку. Установил вентилятор «вниз головой», подал питание и через пол часа он уже работал как новый.
Решение дополнительных проблем, которые не сразу бросаются в глаза
Недавно наткнулся на пропуск шагов двигателя по оси Х, модель была нарезана так, что частенько происходили длинные холостые перемещения на высокой скорости. Не заметить это было сложно, т.к. звук был как будто вал прокручивается на фиксаторах, сдирая ими слой металла )
Проблема решается так же как с инверсией осей, простой командой в консоль:
Так мы ограничиваем скорость холостого хода до приемлемой и о пропусках можно забыть
Даже если нет перемещений по оси Z, двигатель активен, чтобы зафиксировать текущее положение. С настройками по умолчанию он за час работы нагревался до 50 градусов, так же грелся драйвер до 60 градусов. Это не очень страшно, но все же хотелось бы малость их разгрузить. За удержания отвечает параметр $1(step idle delay, msec).
Выставил $1=20, стало намного лучше, при этом на работе это никак не отразилось, по крайней мере я не заметил

Ну и если Ваш станок ведет себя совсем неадекватно, вот все мои параметры, можете прописать себе:
Много информации пришлось выкинуть чтобы сократить материал, но надеюсь смог развеять сомнения насчет трудностей на старте, самым сложным для меня было разобраться в Aspire не переломав все комплектные фрезы. Большое спасибо AndyBig за помощь в освоении основ. Ну и всем, кто дочитал пост до конца.
Станок имеет право на жизнь. Да, алюминиевый профиль им быстро пилить не получится, но если правильно рассчитать скорость и глубину одного прохода, с люминькой можно работать(при скорости 1мм/сек и глубине 0,1мм за проход).
«Детских болячек» не так много и все исправляются за пару-тройку команд через консоль.
При желании можно докупить профиль, валы и расширить рабочую зону.
Комплектные фрезы довольно хрупкие и больше подходят для чистовой обработки мягкого материала, так что докупил набор End Mill «кукурузы» от DrillPro
Для черновой обработки или широких пропилов подходят отлично, правда самую мелкую сломал, когда на высокой скорости пустил резать алюминий (было в обзоре).
И одну 3мм от них же с титановым покрытием и другим строением лезвий, вроде такие должны лучше работать с твердым материалом


После принтера не хватает концевиков хотя бы по осям Х и У, которые могут защитить конструкцию от ошибок пользователя, но мощность двигателей не очень большая, так что сломать что-то кроме фрезы будет сложно, к тому же нулевая точка координат выбирается произвольно пользователем без привязки к какой-то области стола.
GrblControl перерос в более продвинутый Candle , но для работы необходимо прошивать контроллер, на что я пока не созрел.
Для тех кому лень было читать весь обзор, вот команды, которые нужно вбить в консоль после сборки:
Благодаря им двигатель и драйвер оси Z будут меньше греться, пропадет инверсия осей и сойдет на нет риск пропуска шагов при быстрых «холостых» перемещениях.
Если что-то забыл, поправляйте — добавлю
Как всегда, приветствуется конструктивная критика в комментариях. Всем добра =)
Источник