
Время на прочтение5 мин
Количество просмотров9.2K
Небольшой дисклеймер. Эта статья нашлась в моих старых «запасах», и она написана несколько лет назад. Но на фоне новости, что компания, которая производит «донора» для робота решила выпустить набор на Arduino, решил показать, что можно сделать похожее самостоятельно. Благо информация до сих пор не устарела, и никто вам не мешает заменить микроконтроллер на что-то другое.

Собрать робота из отечественного металлического конструктора, который многие из моего поколения помнят еще с уроков школьного труда в детстве. Возможно ли? Такой «вызов» я себе поставил, заодно решив посмотреть как возможность данного предприятия, так и для прощупывания почвы создания хоть и не очень сильного, но конкурента импортных наборов, занимающих на российском рынке монопольную долю. Предупрежу, что далее будет много фотографий и текста и что я покажу только как создать управляемую тележку с микроконтроллером, которую вы самостоятельно сможете дооснастить любыми датчиками.
Идея, с одной стороны, разрешимая — зная, что у импортных аналогов «нашего» конструктора, к примеру компании Merkur, есть двигатели и управление можно было ожидать успеха и в этом случае. С другой стороны — у российского конструктора шаг все-таки метрический, а вся электроника и детали увы «заточены» под дюймовый стандарт. Причем задача стояла не использовать по возможности никакие крепежные элементы, кроме деталей конструктора.
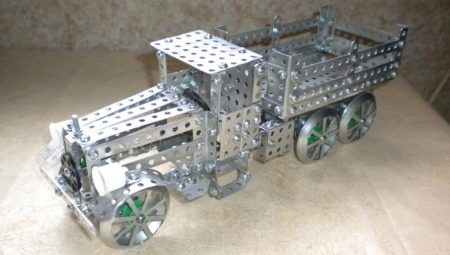
Для этих целей на один из Новых Годов я «подарил» себе набор «Грузовик и трактор». Набор конечно же был отобран сыном сразу после появления дома, трактор собран, потом им играли некоторое время, и уже после можно спокойно было разобрать конструкцию обратно на запчасти.

Также из электронно-китайских запасов были взяты мотор-редукторы с колесами и дисками с прорезями для энкодера — 2 щт, самый дешевый драйвер двигателя — 1 шт, блютус-адаптер HC-06 — 1 шт, энкодеры — 2 шт, макетная плата 17×10 — 1 шт, провода для макетной платы, перемычки, а также плата Arduino Leonardo.
После подготовки я имел гору металлических деталей, маленькую горку электронных компонентов и понимание, что сам конструктор страдает некоторыми недостатками — от мягкого железа деталей до иногда само откручивающегося крепежа. Если первое можно было исправить, взяв комплект от другого производителя, то второй недостаток можно было исправить, только купив новые болты и гайки. На деле же к этому прибегать не пришлось, но стоит учесть в будущем.
Но вернемся к деталям — встал вопрос, а что делать? Было решено построить для начала четырехколесную тележку с двумя независимыми мотор-колесами, энкодерами, блютус и управлением со смартфона. В дальнейшем эту тележку планировалось дополнить датчиками и сделать автономной и управляемой по заданной программе.
После некоторого времени кручения железяк конструктора и прикидывания куда и что разместить, родилась следующая конструкция. Собираем основание тележки с мотор-редукторами и энкодерами.
Собираем основание тележки с мотор-редукторами и энкодерами.
Основание тележки мы собираем из двух симметричных половинок. Я буду использовать терминологию для деталей из официальной инструкции набора. Сначала прикрепляем к большой панели пластик 50×20 двумя винтами. Это будет изолирующее основание для энкодеров. Вы можете их не ставить — для управления по блютус или базовых задач по робототехнике они не обязательны.

К боковой стороне прикручиваете две детали — планку сегментную 2 и планку с тремя отверстиями.

Далее устанавливаете скобу I и уголок I как показано на фото. Энкодеры прикручиваете винтами с гайками М3 (у меня под рукой были только M3x15). Скобы чуть отгибаете. Наклон будет нужен для размещения мотор-редуктора в правильном положении.

Устанавливаете мотор-редуктор с припаянными проводами и заизолированной зоной пайки, так чтобы он попал выступом в паз на сегментной планке и закрепляете на ней же винтом с гайкой M3. У меня не было длинного винта M3 длиной 25-30 мм, поэтому я использовал просто винт M3x15, который вставил в отверстие мотор-редуктора. Обращаем внимание на энкодеры, если вы их поставили.

Фиксируем мотор уголком I и зеркально собираем вторую половину основания и скрепляем их между собой.

Колеса
Наша тележка пока имеет только два колеса. Так как мы не планируем делать балансирующего робота, то ей надо добавить еще точки опоры. Вариантов было несколько — третье колесо, два колеса на одной оси или колеса на независимых осях.
От одного колеса сразу отказались — сделать шарнир нужного свойства из оставшихся деталей было проблематично. Решил сделать конструкцию с независимыми колесами (на фото показана тележка уже со смонтированной электроникой, так как сначала собрал неудачный вариант с колесами на общей оси и в итоге переделывал конструкцию уже после сборки всего робота).
Для сборки одной оси нам понадобятся шпилька L=75M4, колесо большое, уголок I, диск большой и винты с гайками. Главная задача при сборке — ось должна быть закреплена неподвижно и законтрена вторыми гайками, а колесо, наоборот, должно вращаться свободно с небольшим люфтом.

Электроника
Переходим к электронике. Так как у нас экспериментальный робот, то все соединения мы будем делать на макетной плате, а также использовать для управления плату Arduino Leonardo.
Из Панели, 4-х Уголков I, пластика 50×20, Скобы большой и 6 стоек под плату 10×3 (можно использовать три стойки и три винта M3x5) сооружаем каркас для установки макетной платы и платы Arduino.


Далее закрепляем на двусторонний скотч макетную плату 10×17 со сдвигом, так как нам надо будет разместить драйвер двигателя. Если у вас драйвер двигателя с прямыми ножками подключения, вы можете не делать такой сдвиг — главное, чтобы после установки платы Ардуино у вас было место для установки остальных плат. Прикручиваем плату Arduino (я использовал опять же стойки, так как у меня их был избыток, а гаек M3 недостаток.

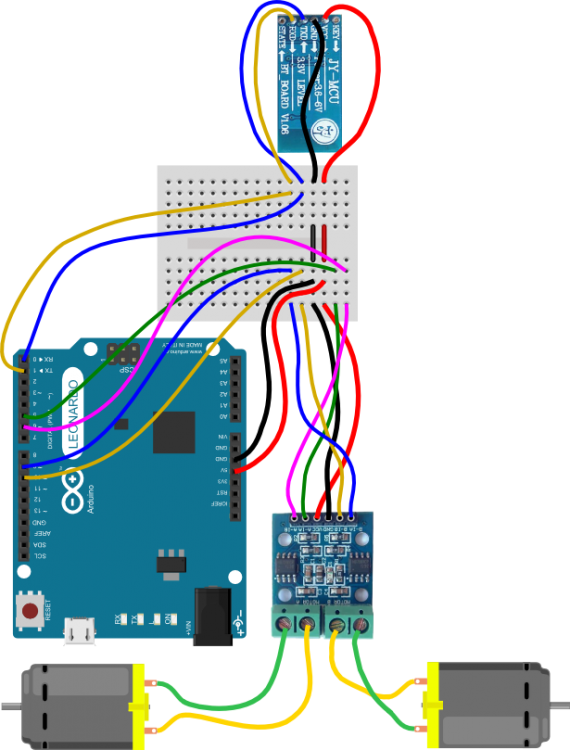
Устанавливаем на макетную плату Bluetooth модуль, плату драйвера и подключаем все провода к макетной плате и плате Arduino по схеме. Энкодеры можно подключить к питанию и Arduino, но я пока их не использовал.
После решил защитить провода и зафиксировать блютус модуль от разбалтывания, поэтому собрал вот такую «защиту» для передней части нашего робота (у нас передние колеса ведущие). Для этого использовали детали: Скоба II — 2 шт, Планка с 10 отв. — 2 шт., Пластик 75×100.

Программное обеспечение
На деле это самая простая часть — в Интернет полно примеров, как заставить такую тележку «бегать» управляя ей со смартфона или другим способом. Для этого используется передача через Serial порт команды в виде буквы и ее последующая обработка. Используя данные производителя платы драйвера двигателей по разводке и таблицу истинности легко задать скетч для Arduino. Конечно, легко на словах — я потратил 4 часа, пытаясь найти проблему работы скетча. Как оказалось для Arduino Leonardo (что кстати написано в документации на сайте) надо использовать Serial1, вместо простого Serial. Поэтому если у вас плата, отличная от Leonardo, используйте нужную подпрограмму для вашей платы (для UNO, к примеру замените все Serial1 на Serial в тексте). Сам код можно найти по ссылке.
Посмотрев код видно, что мы используем стандартную раскладку WASD для движения и T для остановки.
После того как зальете программу в плату, проверьте что моторы подключены правильно и крутятся в нужную сторону, открыв терминал в Arduino IDE и передавая символы команд. Также можете поэкспериментировать со значением PWM.
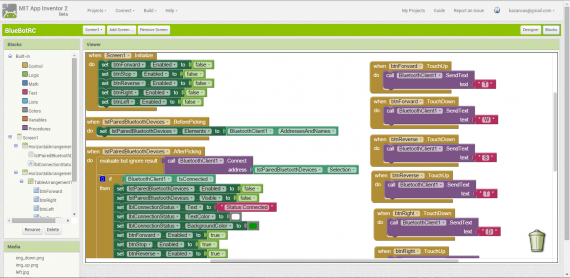
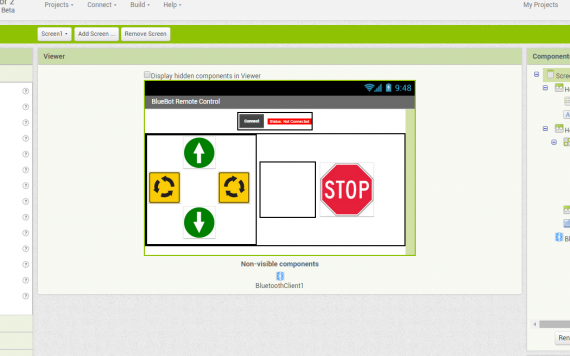
Теперь приложение для Android. Тут тоже все достаточно просто: мы воспользуемся конструктором приложений MIT AppInventor 2 и создадим вот такую программу. В ней мы используем события TouchUp и TouchDown к элементам управления, передавая символ движения при его касании и остановки при отпускании.
Вы можете установить на смартфон специальное приложение для отладки или сформировать пакет для установки на Android смартфон, подключить к тележке батарею (я использовал внешний аккумулятор для смартфона), подключить bluetooth устройство (HC-06 в моем случае) и наслаждаться тем, что вы сами создали радиоуправляемую тележку.
А далее дело за вашей фантазией по превращению в робота. Можете поставить ультразвуковой датчик расстояния и сделать так, чтобы тележка не натыкалась на препятствия. Можете прикрутить фотодатчики и заставить робота ездить по линии. Можете поставить по периметру датчики касания или прикрутить видеокамеру и погрузиться в мир CV. Основа у вас есть, а металлический конструктор не так страшен в создании новых элементов.
Если эта публикация вас вдохновила и вы хотите поддержать автора — не стесняйтесь нажать на кнопку
Схема сборки модели робота ВАЛЛ-И из металлического конструктора

Модель робота ВАЛЛ-И можно собрать из конструктора серии «Самоделкин-80». Перед началом сборки выкладываем детали из набора согласно таблице. Данная подготовка облегчает сборку модели. Этот подход рекомендован при сборке любых моделей из металлического конструктора.
|
Наименование детали |
Рисунок детали |
Количество, шт |
| Планка 2 отв | 2 | |
| Планка 3 отв | 3 | |
| Уголок 1 | 9 | |
| Косынка 1 | 4 | |
| Пластина 20×20 | 3 | |
| Скоба 2 | 2 | |
| Винт М4×6 | 7 | |
| Винт М4×8 | 13 | |
| Винт М4×16 | 2 | |
| Винт М4×20 | 2 | |
| Гайка М4 | 34 |
Детали подготовлены, приступаем к сборке. Хоть модель и небольшая, но может вызвать затруднения при небольшом опыте знакомства с металлическим конструктором. Поэтому рассмотрим сборку подробнее. При сборке применен поузловой метод сборки.
Начинаем сборку с головы и ног-гусениц. Длинные винты при сборке гусениц — М4×20.


Сборку тела робота разделим на две части:
И так, собираем первую часть

Собираем вторую часть

К первой части тела присоединяем голову и ноги-гусеницы

К получившейся первой части тела присоединяем вторую часть тела с помощью длинных винтов M4x16. Данная длина винтов взята для удобства монтажа, при должной сноровке можно использовать винты М4×6.

Готово!

- Подробнее о производителе «Десятое королевство»
- О нас
- Доставка
- Оплата
- Оптовым заказчикам
Нашу продукцию можно купить:
8 (800) 775 41 59
(звонок по рф бесплатный)
- Каталог
Серия игр
- Серия Baby Toys
- Детские конструкторы Baby Blocks
- Игры в табакерке
- Игротека Эколят
- Игры Олеси Емельяновой
- Игры и игрушки серии 10KOR PLASTIC
Обучающие игры
- Электровикторины для детей
- Магнитные игры
- Кукольные театры для детей
- Кормушки для птиц
- Обучающие игры и игрушки
- Развивающие серии
- Развлекательные игры и игрушки
- Учимся читать, учимся считать
- Условия работы
- Поддержка
Инструкции:
- Инструкции для наборов из ниток
- Инструкции для развивающих конструкторов «Велькрошка»
- Инструкции для слепков ручек и ножек
- Инструкции и схемы сборки к металлическим конструкторам
- Инструкции и схемы сборки прочих конструкторов
- Бисер, пайетки, стразы — состав и инструкции
Правила:
- Правила для настольных развлекательных игр и игрушек
- Правила для обучающих игр и игрушек
- Наборы для творчества — инструкции, схемы и правила
- Состав и правила магнитных досок, планшетов и игр
Схемы:
- Схемы сборки деревянных конструкторов «Брусок»
- Схемы сборки мозаики для детей
Сценарии:
- Сценарии сказок для детских кукольных театров Би-Ба-Бо
- Сценарии сказок для Магнитного театра
- Сценарии сказок для Пальчиковых и Фетровых театров
- Сценарии сказок для Театра на столе
- Сценарии сказок для Театра Теней
- Сценарии сказок для штоковых театров
Другое:
- Музей игрушки
- Заботимся о птицах
- Протоколы испытаний
- Бесплатные изображения для выпиливания лобзиком
- Приборы и наборы для выжигания и выпиливания по дереву
- Рисунки для выжигания по дереву
- Дополнительные материалы для электромеханических конструкторов
- Контакты
Поддержка
-
Бесплатные изображения для выпиливания лобзиком
-
Бисер, пайетки, стразы — состав и инструкции
-
Дополнительные материалы для электромеханических конструкторов
-
Заботимся о птицах
- Домики для птиц
- Кормушки для птиц
-
Инструкции для наборов из ниток
-
Инструкции для развивающих конструкторов «Велькрошка»
-
Инструкции для слепков ручек и ножек
-
Инструкции и схемы сборки к металлическим конструкторам
- Конструкторы для уроков труда
- Конструкторы игровые «Как раньше»
- Конструкторы с подвижными деталями
- Конструкторы с цветными деталями «Механик»
- Школьные конструкторы
-
Инструкции и схемы сборки прочих конструкторов
-
Короткие демо ролики
-
Музей игрушки
-
Наборы для творчества — инструкции, схемы и правила
-
Правила для настольных развлекательных игр и игрушек
-
Правила для обучающих игр и игрушек
-
Приборы и наборы для выжигания и выпиливания по дереву
-
Протоколы испытаний
-
Рисунки для выжигания по дереву
- Детские картинки для выжигания
- Контурные рисунки для выжигания
- Простые картинки для выжигания
- Рисунки для выжигания на доске
-
Состав и правила магнитных досок, планшетов и игр
- Комплектация, краткое описание серии игр Магнитные истории
- Методические рекомендации и правила игры Магнитные пифагорики
- Состав и комплектация магнитных досок
-
Схемы сборки деревянных конструкторов «Брусок»
-
Схемы сборки мозаики для детей
-
Сценарии сказок для детских кукольных театров Би-Ба-Бо
-
Сценарии сказок для Магнитного театра
-
Сценарии сказок для Пальчиковых и Фетровых театров
-
Сценарии сказок для Театра на столе
-
Сценарии сказок для штоковых театров
Инструкция по сборке. Металлический конструктор с подвижными деталями «Робот Р1» (02212)
Подробная инструкция по сборке модели Робот Р1 (арт. 02212).
Мечты о создании своего собственного робота может быть волнующим приключением для любого энтузиаста техники. Если вы являетесь новичком, то это руководство поможет вам разобраться, как создать робота из железа пошагово. Следуя этим простым инструкциям, вы сможете создать удивительное техническое чудо, которое будет радовать вас и ваших друзей.
Шаг 1: Планирование. Прежде всего, решите, какой тип робота вы хотите создать. Это может быть простой робот-игрушка или более сложный автоматический помощник. Разработайте план, который включает в себя основные функции и характеристики вашего робота.
Шаг 2: Сборка материалов. Соберите все необходимые материалы и инструменты. Вам понадобятся стальные листы, провода, моторы, реле, паяльник, резиновые прокладки и другие компоненты. Убедитесь, что у вас есть все необходимое перед началом работы.
Шаг 3: Сборка основы. Сначала создайте основу для вашего робота из железных листов. Используйте прокладки из резины, чтобы гарантировать надежное соединение всех деталей. Помните, что стабильная и прочная основа является основой успеха вашего проекта.
Шаг 4: Подключение компонентов. Подключите моторы, реле и другие компоненты к основе робота. Убедитесь, что провода подключены правильно и надежно закреплены. Проверьте все соединения перед переходом к следующему шагу.
Шаг 5: Программирование. Напишите программу для вашего робота, чтобы он мог выполнять нужные вам функции. Используйте языки программирования, такие как C++ или Python, чтобы создать код, который будет управлять движением и действиями вашего робота.
Шаг 6: Тестирование и настройка. После программирования протестируйте вашего робота, чтобы убедиться, что все функции работают корректно. Внесите необходимые корректировки и настройки, чтобы достичь желаемых результатов.
Создание робота из железа может быть увлекательным и наградительным процессом. Следуя этим шагам, вы сможете оживить своего собственного железного спутника, который будет вам верен и поможет вам во многих задачах. Не бойтесь экспериментировать и быть творческими. Удачи в создании вашего робота!
Содержание
- Шаг 1: Подготовка инструментов и материалов
- Шаг 2: Создание основы робота
- Шаг 3: Добавление двигателей и электроники
Шаг 1: Подготовка инструментов и материалов
Перед тем, как приступить к созданию робота из железа, необходимо подготовить все необходимые инструменты и материалы.
Вот список основных инструментов, которые вам понадобятся:
- Набор отверток: для сборки и разборки компонентов.
- Пинцет: для аккуратной работы с мелкими деталями.
- Кусачки: для обрезания проводов и металлических элементов.
- Паяльник и припой: для соединения проводов и компонентов.
Также вам понадобятся следующие материалы:
- Металлические детали: такие как листы железа, провода, шайбы и гайки.
- Электронные компоненты: такие как микроконтроллеры, моторы, разъемы и светодиоды.
- Батарейки или аккумуляторы: для питания робота.
- Крепежные элементы: такие как болты, гайки и шурупы.
Убедитесь, что у вас есть все необходимые инструменты и материалы перед тем, как начать сборку робота. Это поможет вам избежать прерываний работы по мере продвижения вперед.
Шаг 2: Создание основы робота
Шаг 2.1: Изготовление каркаса
Для изготовления каркаса вам понадобятся железные прутки или пластины, которые можно приобрести в металлургическом магазине. Выберите материал нужной длины и толщины в зависимости от размеров и веса вашего робота.
Используя инструменты для резки металла, аккуратно отрежьте прутки или пластины на нужные размеры согласно чертежу. Помните, что точность размеров очень важна для правильной сборки робота.
Шаг 2.2: Соединение каркаса
После того, как вы отрежете все необходимые детали каркаса, необходимо соединить их между собой. Для этого используйте сварочный аппарат или специальные крепежи для металла, такие как болты или заклепки.
Если вы используете сварку, будьте осторожны и следите за безопасностью. Нанесите сварочные швы на соединения и убедитесь, что они прочно держат.
Шаг 2.3: Установка дополнительных элементов
Каркас робота должен быть оснащен дополнительными элементами, такими как крепежи для электроники и механизмов. Установите эти элементы на каркасе с помощью специальных крепежных элементов.
Также не забудьте предусмотреть отверстия или крепежные элементы для установки колес или ног робота, в зависимости от его конструкции.
После выполнения всех этих шагов вы получите прочную и устойчивую основу для вашего робота из железа, которая станет фундаментом для установки остальных компонентов.
Шаг 3: Добавление двигателей и электроники
После того, как основа и форма нашего робота созданы, необходимо установить двигатели, которые будут отвечать за его движение. Для этого выберите подходящие двигатели, которые совместимы с вашим дизайном и требованиями.
Установите двигатели в соответствии с инструкциями производителя. Обычно это включает в себя крепление двигателей к основе робота и подключение их к блоку питания.
После того, как двигатели установлены, вам потребуется добавить электронику, чтобы управлять движением робота. Для этого используйте микроконтроллер или разработайте собственную плату управления.
Соедините двигатели с электроникой, следуя инструкциям и схеме подключения. Убедитесь, что все соединения правильно сделаны и обеспечивают надежную связь между двигателями и электроникой.
Важно: Обратите внимание на положительный и отрицательный полюса при подключении электроники и двигателей. Неправильное подключение может привести к ошибкам работы робота или даже повреждению компонентов.
После того, как двигатели и электроника установлены и подключены, ваш робот будет готов к тестированию и программированию. Продолжайте следовать пошаговой инструкции и переходите к следующему шагу, чтобы узнать, как запустить и управлять вашим новым железным другом!
Что можно сделать из металлического конструктора?
Содержание
- Как собрать робота?
- Как построить танк?
- Сборка других моделей
Металлический конструктор в отличие от своих пластиковых собратьев LEGO и «Полесье», а также более универсальных комплектов, где роль металлических деталей отводится лишь винтам, гайкам, болтам, шурупам, шайбам и скобам, представляет собой средство безграничного простора для фантазии.

Как собрать робота?
Робот по сравнению с машиной, танком, самолётом представляет собой наиболее простое из машинных конструкций устройство. Пример пошаговой инструкции выглядит следующим образом.
- Используйте в начале сборки головы две полосковые металлические детали в виде буквы П, соединив их встречно и посередине. Размеры сторон, например, по 2,5 см.
- Голова робота выйдет не в виде коробки, как это обычно бывает с многими моделями, а в качестве подвеса; головой эта конструкция считается лишь условно. Привинтите к концам получившейся Ш-образной конструкции две проушины, выполняющие роль «ушных» зажимов.
- В середине получившейся сборки прикрепите вертикальную полоску стали – она послужит своеобразной шеей.
- К этой полоске привинтите заднюю планку с загнутыми краями со всех четырёх сторон – она послужит спиной (задней частью туловища) робота. Если нет желания прикручивать и переднюю (такую же) панель, то можно для туловища взять пластину типа удлинённый треугольник.
- К плечам – слева и справа – прикрутите руки робота, используя цельные или сборные (двухдетальные) пластины.
- Для закрепления ног прикрутите горизонтальную пластину к нижней части туловища робота.
- Привинтите к этой пластине цельные или сборные ноги, изготовленные по образу и подобию рук. Пластины при этом должны оказаться заметно длиннее.
Робот из металлоконструктора собран. Данный макет собрать очень легко – он послужит первым реальным шагом для новичков, овладевающих построением робототехники, машин и механизмов на основе полностью металлических деталей.
Смотрите видео по теме.
Как построить танк?
Танк, построенный из железного конструкторского набора, соорудить до нескольких раз сложнее: профессиональные макеты, напоминающие советские и немецкие модели танков, насчитывают в себе не менее нескольких сотен деталей. Чтобы макет не просто стоял, а ездил, необходимо оснастить его колёсами. С этой целью берутся готовые наборы, в которых колёса и гусеницы уже присутствуют. Пошаговая инструкция по сборке танка из ненаборных (не из комплекта) деталей заключается в следующем.
- В центр одной из крупных загнутых со всех сторон пластин вставьте посередине длинный винт (от 2 см). Накиньте на него 4 круглые пластины, одним концом наденьте длинную, и затяните всю эту конструкцию при помощи гайки.
- По бокам с помощью болтов привинтите длинные уголки.
Потребуется несколько болтов, чтобы окончательно закрепить макет танка.
Данная модель – слишком примитивная: ей не хватает многих запчастей. К примеру, макет пушки стоило бы посадить на втулку с пружиной, чтобы ствол импровизированного орудия не раскачивался самопроизвольно. Для того чтобы конструкция ездила, по бокам прикрепляют по 4 ведомых колеса – с каждой стороны. Ведущие (направляющие) колёса ставятся спереди и сзади – с боковых сторон танка, а на них натягивается резиновая гусеница. Сделать гусеничный ход, который реально передвигал бы боевую машину, невозможно, используя лишь жёсткие, неподвижные и не вполне доработанные конструкции. И это минимальные доработки – без них макет танка не считался бы реалистичным. Скорее он походил бы на брошенный на металлолом остов машины, утратившей былую боеспособность.
Эта упрощённая схема хороша для детей, которые только начали ознакомление с образцами военной техники. Большую реалистичность ствол орудийной башни танка обретает, когда вместо длинной полосы стали устанавливают металлическую трубку или даже кусок более толстостенной трубы (с толщиной стенок до 1 мм). Но главная задача выполнена – остов танка собран из деталей от детского конструктора, произведённого из металла, а не из пластика.

Далее смотрите вариант сборки танка из металлического конструктора.
Сборка других моделей
Из металлического конструктора можно сработать не только танк или робота. Большое количество моделей ретроавтомобилей довоенных и послевоенных периодов XX века побуждает юных экспериментаторов воссоздать реалистичный макет «Форда», «Мерседеса» или советского «Москвича» тех, первых поколений. Впрочем, и современные машины в умелых руках, к примеру, «Лада-Приора» с не меньшим успехом копируются в миниатюре.
Все макеты являются поделками, но при должном старании их можно моторизировать, навесить на них источник автономного питания (перезаряжаемый аккумуляторный элемент), оснастить подсветкой, программным микроконтроллером. Высший пилотаж – радиоуправление по Wi-Fi или Bluetooth. Но начнём с простого. Пошагово процесс сборки машины может выглядеть следующим образом.
- Две загнутые с двух сторон пластины, например, 5х7 см, соедините между собой по центру сверху – с помощью перемычки.
- С одного из торцов двойной пластины по центру установите уголок-перемычку, и привинтите на другой его конец другую пластину, поперечную. Размер последней может достигать, к примеру, 5х1,5 см.
- На продольные боковины установите колёса. Осями для них служат длинные винты, к примеру, М-3 длиной в 7-8 см. Закрепите передние колёса на осях при помощи гаек. Оси должны проходить сквозь крайние свободные отверстия боковых загибов основных пластин.
- Перед закреплением задних колёс просуньте их оси сквозь две дополнительные пластинки 5х1,5 см – такие же, какая была установлена спереди. Убедитесь, что они стоят вертикально. Затяните задние колёса, чтобы пластинки не болтались.
- Ближе к середине основной платформы (днища машины) установите одиночные боковые перекладины. Они должны оказаться вдвое уже задних, а их высота должна совпадать с высотой прежних.
- Установите крышу – третью большую пластину. Все соединения по-прежнему фиксируется гаечно-винтовыми креплениями.
- Проверьте и затяните все гайки.
Полезно подкладывать под гайки пресс- и гроверные шайбы: сначала на винты надеваются первые, затем – вторые и, наконец, устанавливаются и затягиваются сами гайки.
Впоследствии машинку можно доработать, обшив её одиночными пластинками. Но эта стадия скорее относится к финальному оформлению, так как несуще-ходовая конструкция уже собрана.
Если дети почувствовали тягу к дальнейшему творчеству, то можно продолжать оснащать собранные модели, заменив, к примеру, «намертво» затянутые ступицы подпружиненными креплениями, ввернув внутрь роликовые подшипниковые комплекты. Машинка будет не стоять, а уверенно ездить; по ходу доработки выравнивается возможная кривизна. Далее в машинку устанавливаются моторчик, аккумулятор, выключатель, светодиодная подсветка – и простая поделка превращается в полноценную, способную преодолевать большие расстояния модель.
О том, как сделать машину из металлического конструктора, смотрите в следующем видео.